 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConfiguration-Space Flipper Planning for Rescue Robots
May 09, 2019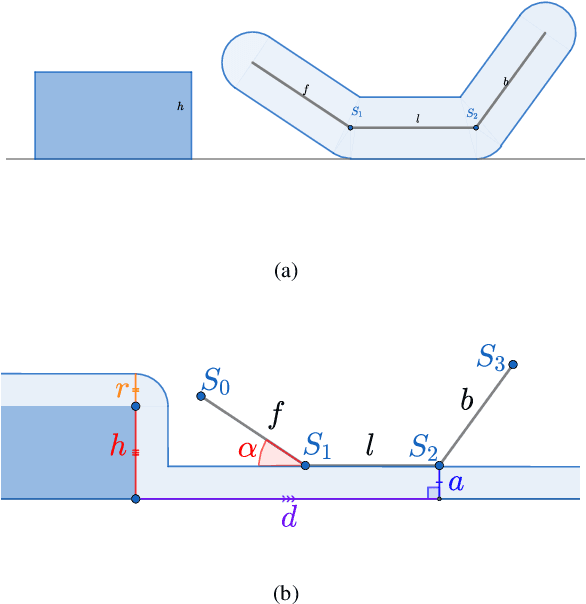
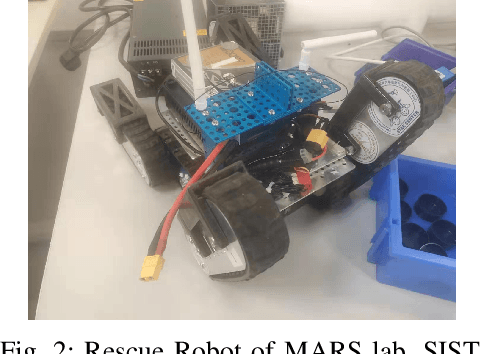
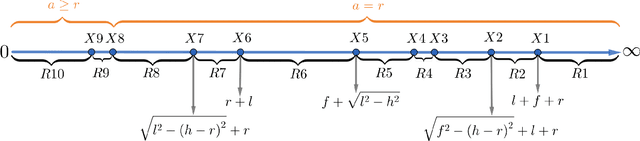
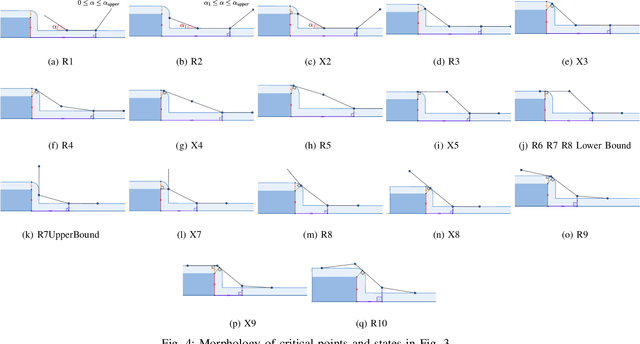
For rescue robots, flipper endows the robot with additional ability to pass through various terrain. Autonomous motion becomes more important. In recent work autonomy is done by either planning with several special states or based on collected data. We are considering if it is possible to find a way to build continues states without collecting old trail data. In this paper, we first model the possible states as a global planning path with parameter configuration of the scene. Then, we follows the path to achieve the autonomous run. We plot the morphology of each path points to show the correctness of the path and implement a simple path following on real robot to demonstrate the performance of our algorithm.
Fast Gaussian Process Occupancy Maps
Nov 26, 2018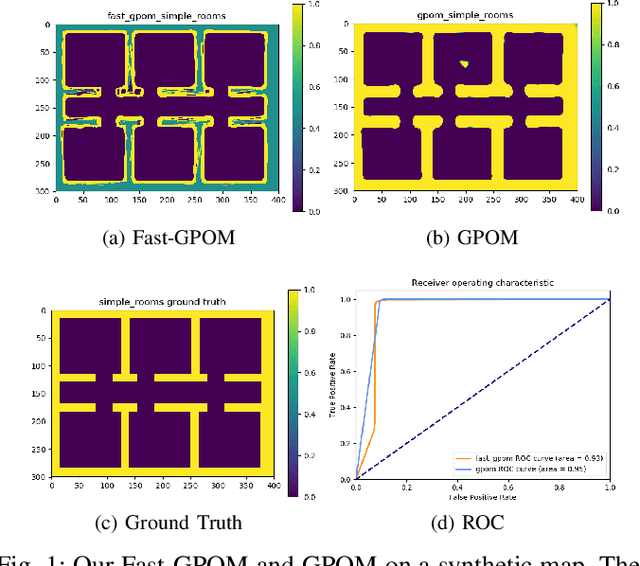
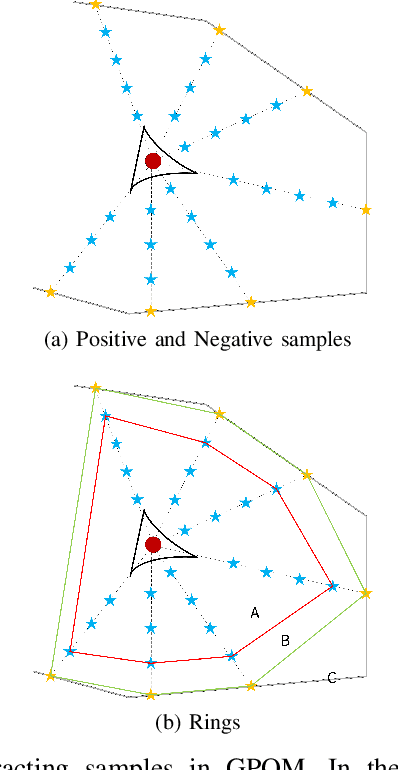
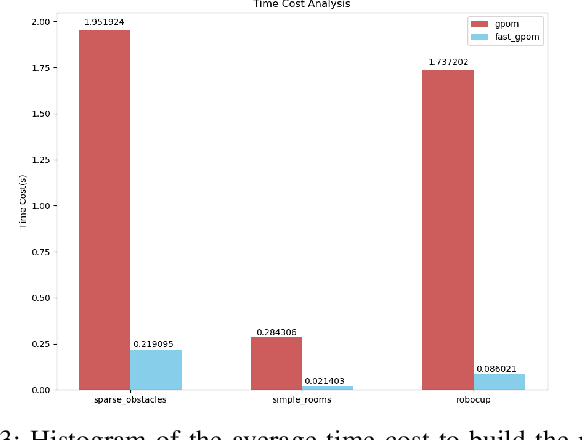
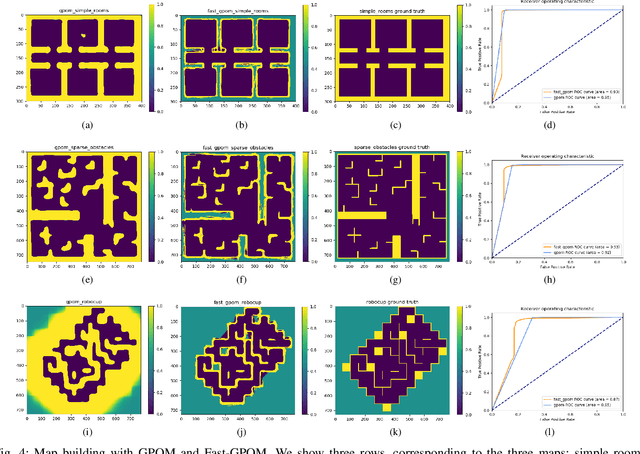
In this paper, we demonstrate our work on Gaussian Process Occupancy Mapping (GPOM). We concentrate on the inefficiency of the frame computation of the classical GPOM approaches. In robotics, most of the algorithms are required to run in real time. However, the high cost of computation makes the classical GPOM less useful. In this paper we dont try to optimize the Gaussian Process itself, instead, we focus on the application. By analyzing the time cost of each step of the algorithm, we find a way that to reduce the cost while maintaining a good performance compared to the general GPOM framework. From our experiments, we can find that our model enables GPOM to run online and achieve a relatively better quality than the classical GPOM.
Topological Area Graph Generation and its Application to Path Planning
Nov 14, 2018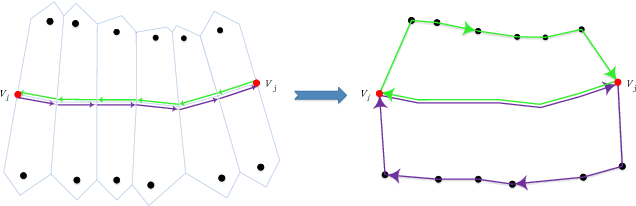


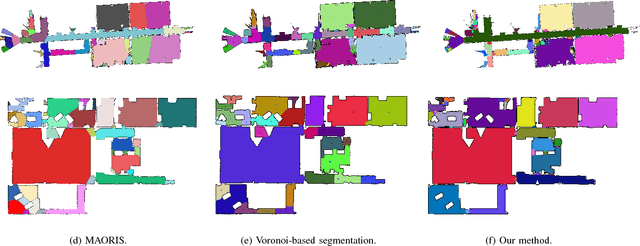
Representing a scanned map of the real environment as a topological structure is an important research in robotics. %is currently an important research. Since topological representations of maps save a huge amount of map storage space and online computing time, they are widely used in fields such as path planning, map matching, and semantic mapping. We propose a novel topological map representation, the Area Graph, in which the vertices represent areas and edges represent passages. The Area Graph is developed from a pruned Voronoi Graph, the Topology Graph. The paper also presents path planning as one application for the Area Graph. For that, we derive a so-called Passage Graph from the Area Graph. Because our algorithm segments the map as a set of areas, the first experiment compares the results of the Area Graph with that of state-of-the-art segmentation approaches, which proved that our method effectively prevented over-segmentation. Then the second experiment shows the superiority of our method over the traditional A* planning algorithm.
Incrementally Building Topology Graphs via Distance Maps
Nov 05, 2018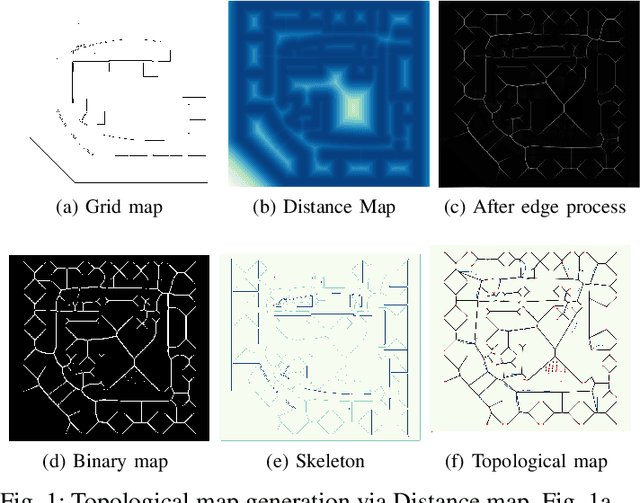
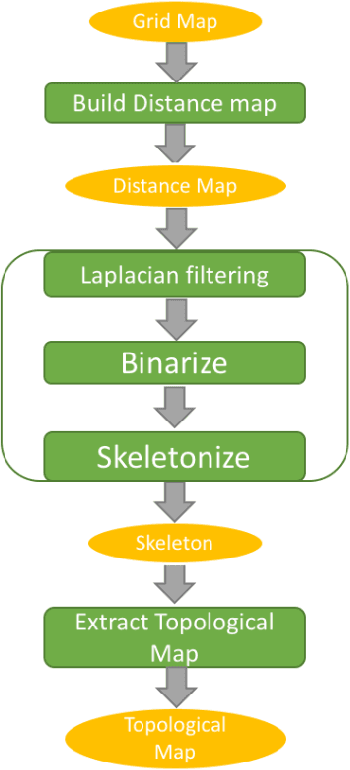
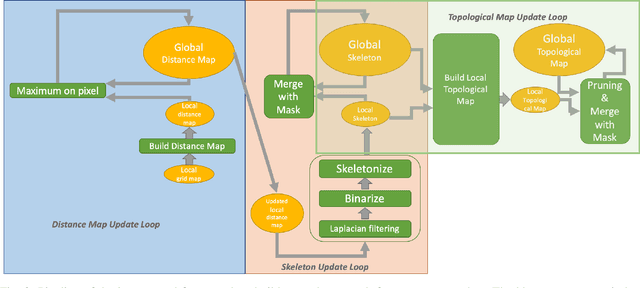
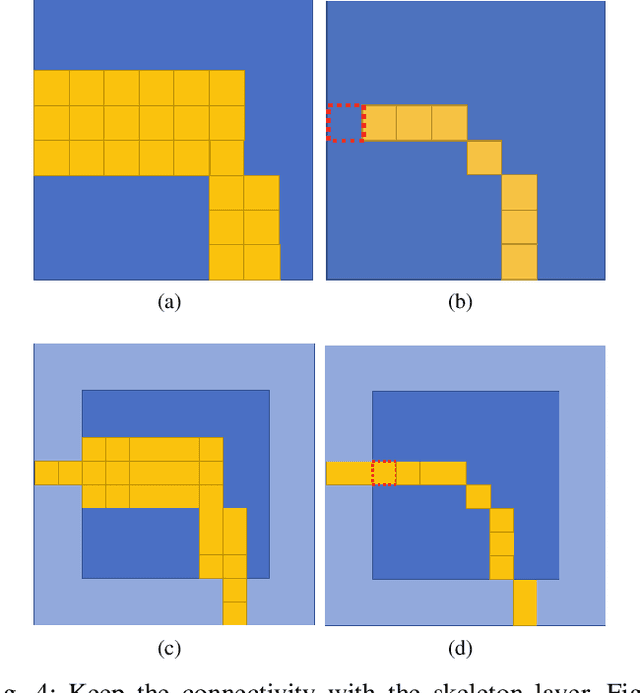
Mapping is an essential task for mobile robots and topological representation often works as a basis for the various applications. In this paper, a novel framework that can build topological maps incrementally is proposed. The algorithm is based on distance map, and in our framework the topological map can grow as we append more sensor data into it. To demonstrate the result, we show the result of the distance map based method on several popular maps and run the incremental framework with the raw sensor data to have a growing topological map as robot explores the environment.