 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHow to Design a Compact High-Throughput Video Camera?
Apr 12, 2026High throughput video acquisition is a challenging problem and has been drawing increasing attention. Existing high throughput imaging systems splice hundreds of sub-images/videos into high throughput videos, suffering from extremely high system complexity. Alternatively, with pixel sizes reducing to sub-micrometer levels, integrating ultra-high throughput on a single chip is becoming feasible. Nevertheless, the readout and output transmission speed cannot keep pace with the increasing pixel numbers. To this end, this paper analyzes the strength of gradient cameras in fast readout and efficient representation, and proposes a low-bit gradient camera scheme based on existing technologies that can resolve the readout and transmission bottlenecks for high throughput video imaging. A multi-scale reconstruction CNN is proposed to reconstruct high-resolution images. Extensive experiments on both simulated and real data are conducted to demonstrate the promising quality and feasibility of the proposed method.
Learnable Burst-Encodable Time-of-Flight Imaging for High-Fidelity Long-Distance Depth Sensing
May 28, 2025



Long-distance depth imaging holds great promise for applications such as autonomous driving and robotics. Direct time-of-flight (dToF) imaging offers high-precision, long-distance depth sensing, yet demands ultra-short pulse light sources and high-resolution time-to-digital converters. In contrast, indirect time-of-flight (iToF) imaging often suffers from phase wrapping and low signal-to-noise ratio (SNR) as the sensing distance increases. In this paper, we introduce a novel ToF imaging paradigm, termed Burst-Encodable Time-of-Flight (BE-ToF), which facilitates high-fidelity, long-distance depth imaging. Specifically, the BE-ToF system emits light pulses in burst mode and estimates the phase delay of the reflected signal over the entire burst period, thereby effectively avoiding the phase wrapping inherent to conventional iToF systems. Moreover, to address the low SNR caused by light attenuation over increasing distances, we propose an end-to-end learnable framework that jointly optimizes the coding functions and the depth reconstruction network. A specialized double well function and first-order difference term are incorporated into the framework to ensure the hardware implementability of the coding functions. The proposed approach is rigorously validated through comprehensive simulations and real-world prototype experiments, demonstrating its effectiveness and practical applicability.
C-Silicon-based metasurfaces for aperture-robust spectrometer/imaging with angle integration
Oct 31, 2023



Compared with conventional grating-based spectrometers, reconstructive spectrometers based on spectrally engineered filtering have the advantage of miniaturization because of the less demand for dispersive optics and free propagation space. However, available reconstructive spectrometers fail to balance the performance on operational bandwidth, spectral diversity and angular stability. In this work, we proposed a compact silicon metasurfaces based spectrometer/camera. After angle integration, the spectral response of the system is robust to angle/aperture within a wide working bandwidth from 400nm to 800nm. It is experimentally demonstrated that the proposed method could maintain the spectral consistency from F/1.8 to F/4 (The corresponding angle of incident light ranges from 7{\deg} to 16{\deg}) and the incident hyperspectral signal could be accurately reconstructed with a fidelity exceeding 99%. Additionally, a spectral imaging system with 400x400 pixels is also established in this work. The accurate reconstructed hyperspectral image indicates that the proposed aperture-robust spectrometer has the potential to be extended as a high-resolution broadband hyperspectral camera.
Adaptive and Cascaded Compressive Sensing
Mar 21, 2022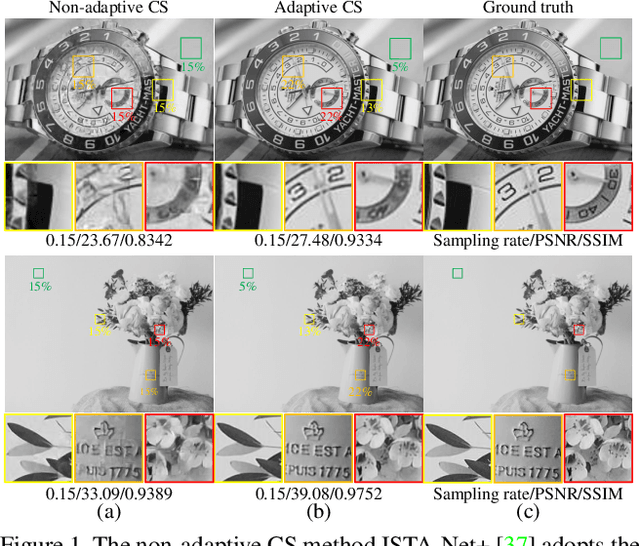
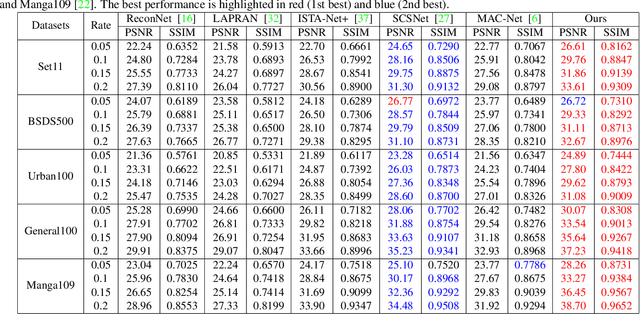
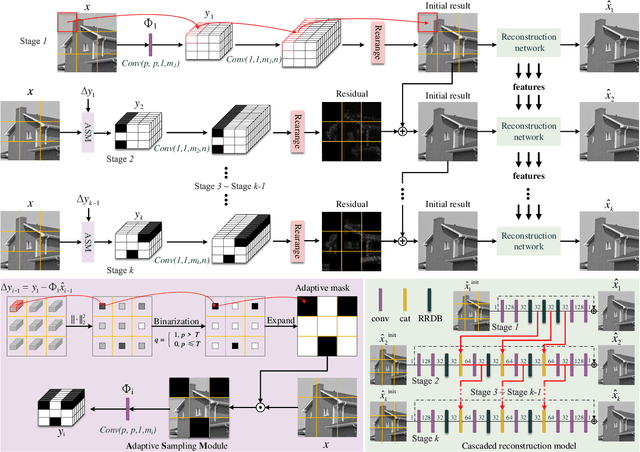
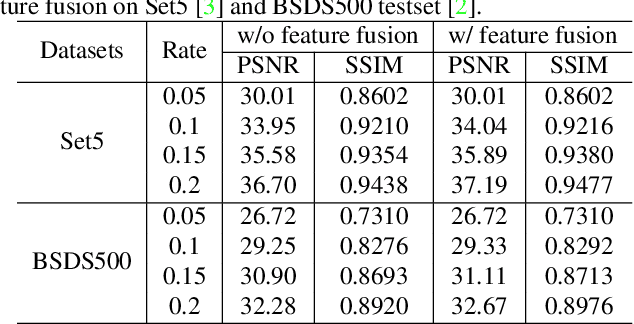
Scene-dependent adaptive compressive sensing (CS) has been a long pursuing goal which has huge potential in significantly improving the performance of CS. However, without accessing to the ground truth image, how to design the scene-dependent adaptive strategy is still an open-problem and the improvement in sampling efficiency is still quite limited. In this paper, a restricted isometry property (RIP) condition based error clamping is proposed, which could directly predict the reconstruction error, i.e. the difference between the currently-stage reconstructed image and the ground truth image, and adaptively allocate samples to different regions at the successive sampling stage. Furthermore, we propose a cascaded feature fusion reconstruction network that could efficiently utilize the information derived from different adaptive sampling stages. The effectiveness of the proposed adaptive and cascaded CS method is demonstrated with extensive quantitative and qualitative results, compared with the state-of-the-art CS algorithms.