 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAuto Researching, not hyperparameter tuning: Convergence Analysis of 10,000 Experiments
Mar 16, 2026When LLM agents autonomously design ML experiments, do they perform genuine architecture search -- or do they default to hyperparameter tuning within a narrow region of the design space? We answer this question by analyzing 10,469 experiments executed by two LLM agents (Claude Opus and Gemini 2.5 Pro) across a combinatorial configuration space of 108,000 discrete cells for dashcam collision detection over 27 days. Through ANOVA decomposition, we find that \textbf{architectural choices explain 94\% of performance variance} ($F = 1324$, $η^2 = 0.94$), while hyperparameter variation within a fixed architecture explains only 6\%. Cross-task validation on a second collision dataset confirms this finding (75\% architecture-explained variance) with a \emph{different} winning backbone, confirming genuine architecture discovery. The agents' key contribution is discovering that V-JEPA\,2 video features with Zipformer temporal encoders achieve 0.9245 AP -- a configuration no human proposed -- and concentrating search on productive architectural regions: at $N = 50$, LLM-guided search reaches AP $= 0.985$ versus $0.965$ for from-scratch random search. Post-bugfix convergence follows a power law ($c = 0.11$, $R^2 = 0.93$); the low exponent reflects the cost of broad exploration, not inefficiency, since the LLM discovers qualitatively better regions than random or Bayesian baselines. We characterize multi-agent search dynamics via entropy cycles and Jensen--Shannon specialization, providing the first large-scale empirical framework for LLM-guided combinatorial ML experiment design.
A Scenario-Based Development Framework for Autonomous Driving
Nov 05, 2020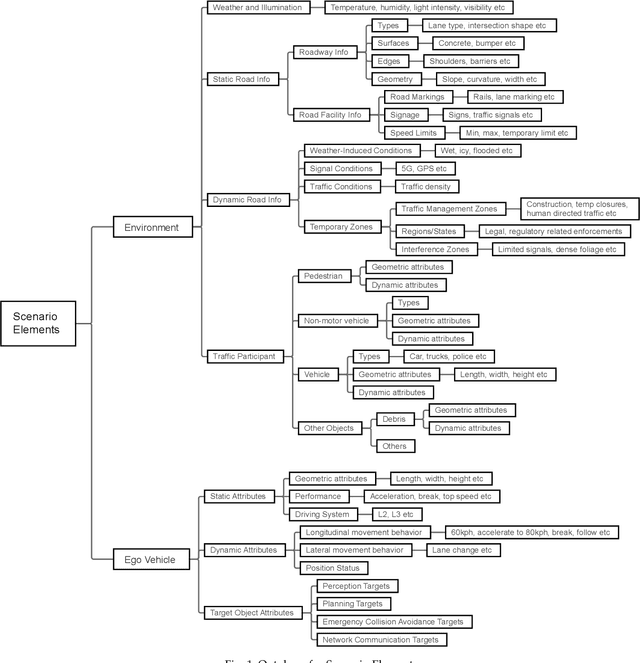



This article summarizes the research progress of scenario-based testing and development technology for autonomous vehicles. We systematically analyzed previous research works and proposed the definition of scenario, the elements of the scenario ontology, the data source of the scenario, the processing method of the scenario data, and scenario-based V-Model. Moreover, we summarized the automated test scenario construction method by random scenario generation and dangerous scenario generation.