 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAbout an Automating Annotation Method for Robot Markers
Jan 30, 2026Factory automation has become increasingly important due to labor shortages, leading to the introduction of autonomous mobile robots for tasks such as material transportation. Markers are commonly used for robot self-localization and object identification. In the RoboCup Logistics League (RCLL), ArUco markers are employed both for robot localization and for identifying processing modules. Conventional recognition relies on OpenCV-based image processing, which detects black-and-white marker patterns. However, these methods often fail under noise, motion blur, defocus, or varying illumination conditions. Deep-learning-based recognition offers improved robustness under such conditions, but requires large amounts of annotated data. Annotation must typically be done manually, as the type and position of objects cannot be detected automatically, making dataset preparation a major bottleneck. In contrast, ArUco markers include built-in recognition modules that provide both ID and positional information, enabling automatic annotation. This paper proposes an automated annotation method for training deep-learning models on ArUco marker images. By leveraging marker detection results obtained from the ArUco module, the proposed approach eliminates the need for manual labeling. A YOLO-based model is trained using the automatically annotated dataset, and its performance is evaluated under various conditions. Experimental results demonstrate that the proposed method improves recognition performance compared with conventional image-processing techniques, particularly for images affected by blur or defocus. Automatic annotation also reduces human effort and ensures consistent labeling quality. Future work will investigate the relationship between confidence thresholds and recognition performance.
Visible Light Communication using Led-Based AR Markers for Robot Localization
Jan 10, 2026A method of information transmission using visual markers has been widely studied. In this approach, information or identifiers (IDs) are encoded in the black-and-white pattern of each marker. By analyzing the geometric properties of the marker frame - such as its size, distortion, and coordinates - the relative position and orientation between the camera and the marker can be estimated. Furthermore, by associating the positional information of each marker with its corresponding ID, the position of the camera that takes the image picture can be calculated. In the field of mobile robotics, such markers are commonly utilized for robot localization. As mobile robots become more widely used in everyday environments, such visual markers are expected to be utilized across various contexts. In environments where robots collaborate with humans - such as in cell-based manufacturing systems in factories or in domestic settings with partner robots - it is desirable for such markers to be designed in a manner that appears natural and unobtrusive to humans. In this paper, we propose a method for implementing an ArUco marker in the form of illumination. In the proposed method, LEDs are arranged in accordance with the grid pattern of the marker, and the blinking frequency of each LED is determined based on the corresponding black or white cell. As a result, the illumination appears uniformly bright to the human eye, while the camera can capture variations in the blinking frequency. From these differences, the black-and-white pattern can be reconstructed, enabling the identification of the marker's tag information. We develop a prototype system, and conduct experiments which are conducted to evaluate its performance in terms of recognition accuracy under varying distances and viewing angles with respect to the ArUco marker.
From Production Logistics to Smart Manufacturing: The Vision for a New RoboCup Industrial League
Jul 15, 2025

The RoboCup Logistics League is a RoboCup competition in a smart factory scenario that has focused on task planning, job scheduling, and multi-agent coordination. The focus on production logistics allowed teams to develop highly competitive strategies, but also meant that some recent developments in the context of smart manufacturing are not reflected in the competition, weakening its relevance over the years. In this paper, we describe the vision for the RoboCup Smart Manufacturing League, a new competition designed as a larger smart manufacturing scenario, reflecting all the major aspects of a modern factory. It will consist of several tracks that are initially independent but gradually combined into one smart manufacturing scenario. The new tracks will cover industrial robotics challenges such as assembly, human-robot collaboration, and humanoid robotics, but also retain a focus on production logistics. We expect the reenvisioned competition to be more attractive to newcomers and well-tried teams, while also shifting the focus to current and future challenges of industrial robotics.
About Digital Communication Methods for Visible Light Communication
Jun 06, 2021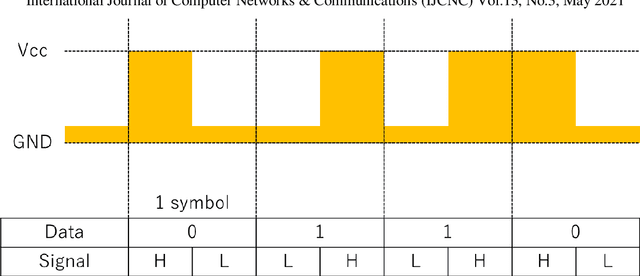

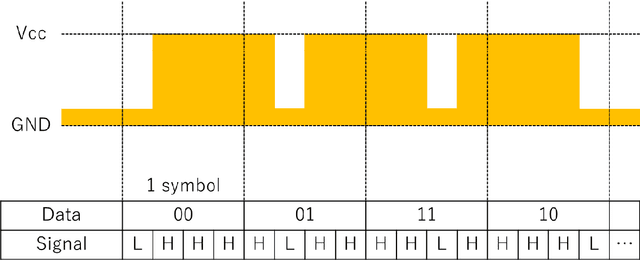

The visible light communication (VLC) by LED is one of the important communication methods because LED can work as high speed and VLC sends the information by high flushing LED. We use the pulse wave modulation for the VLC with LED because LED can be controlled easily by the microcontroller, which has the digital output pins. At the pulse wave modulation, deciding the high and low voltage by the middle voltage when the receiving signal level is amplified is equal to deciding it by the threshold voltage without amplification. In this paper, we proposed two methods that adjust the threshold value using counting the slot number and measuring the signal level. The number of signal slots is constant per one symbol when we use Pulse Position Modulation (PPM). If the number of received signal slots per one symbol time is less than the theoretical value, that means the threshold value is higher than the optimal value. If it is more than the theoretical value, that means the threshold value is lower. So, we can adjust the threshold value using the number of received signal slots. At the second proposed method, the average received signal level is not equal to the signal level because there is a ratio between the number of high slots and low slots. So, we can calculate the threshold value from the average received signal level and the slot ratio. We show these performances as real experiments.