 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMitigating Vulnerable Road Users Occlusion Risk Via Collective Perception: An Empirical Analysis
Apr 11, 2024Recent reports from the World Health Organization highlight that Vulnerable Road Users (VRUs) have been involved in over half of the road fatalities in recent years, with occlusion risk - a scenario where VRUs are hidden from drivers' view by obstacles like parked vehicles - being a critical contributing factor. To address this, we present a novel algorithm that quantifies occlusion risk based on the dynamics of both vehicles and VRUs. This algorithm has undergone testing and evaluation using a real-world dataset from German intersections. Additionally, we introduce the concept of Maximum Tracking Loss (MTL), which measures the longest consecutive duration a VRU remains untracked by any vehicle in a given scenario. Our study extends to examining the role of the Collective Perception Service (CPS) in VRU safety. CPS enhances safety by enabling vehicles to share sensor information, thereby potentially reducing occlusion risks. Our analysis reveals that a 25% market penetration of CPS-equipped vehicles can substantially diminish occlusion risks and significantly curtail MTL. These findings demonstrate how various scenarios pose different levels of risk to VRUs and how the deployment of Collective Perception can markedly improve their safety. Furthermore, they underline the efficacy of our proposed metrics to capture occlusion risk as a safety factor.
Tracking Accuracy Based Generation Rules of Collective Perception Messages
Sep 28, 2022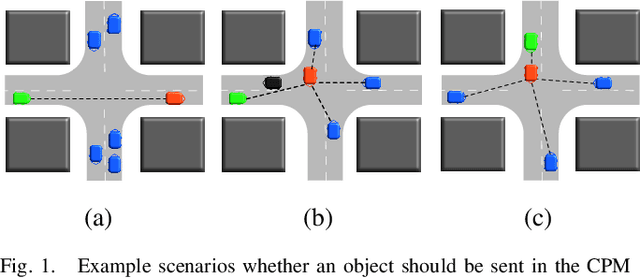
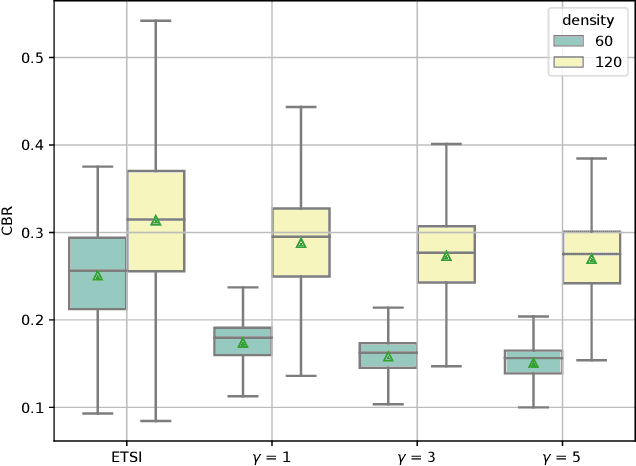
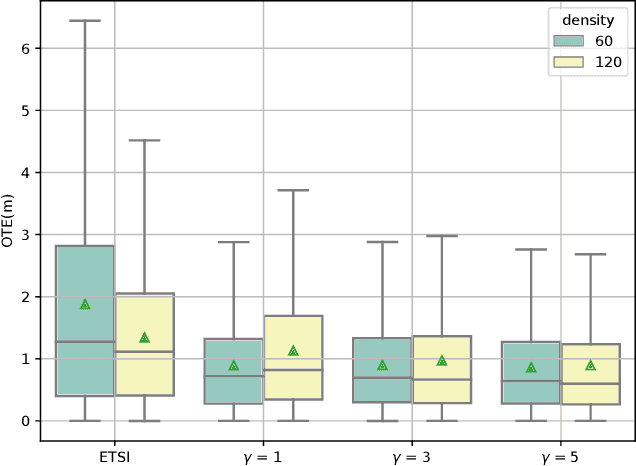
The Collective Perception Service (CPS) enables the enhancement of environmental awareness of Intelligent Transport System Stations (ITS-S) through the exchange of tracking information between stations. As the market penetration of CPS is growing, the intelligent distribution of the limited communication resources becomes more and more challenging. To address this problem, the ETSI CPS proposes dynamic-based object selection to generate Collective Perception Messages. However, this approach has limits and barely considers detection accuracy and the recent information available at other ITS-Ss in the transmission range. We show a proposal considering the current object tracking accuracy in the local environment and the object tracking from messages received by other stations in order to intelligently decide whether to include an object in a CPM. The algorithm decides based on the relative entropy between the local and V2X tracking accuracy if the object information is valuable for the nearby stations. Our simulation according to the ITS-G5 standard shows that the Channel Busy Ratio (CBR) can be reduced with accuracy-based generation of CPM while improving Object Tracking Accuracy (OTA) compared to generation based on ETSI rules.