 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRadar detection rate comparison through a mobile robot platform at the ZalaZONE proving ground
Oct 22, 2020



Since an automotive driving vehicle is controlled by Advanced Driver-Assistance Systems (ADAS) / Automated Driving (AD) functions, the selected sensors for the perception process become a key component of the system. Therefore, the necessity of ensuring precise data is crucial. But the correctness of the data is not the only part that has to be ensured, the limitations of the different technologies to accurately sense the reality must be checked for an error-free decision making according to the current scenario. In this context, this publication presents a comparison between two different automotive radars through our self-developed robot mobile platform called SPIDER, and how they can detect different kinds of objects in the tests carried out at the ZalaZONE proving ground.
Evaluation of an indoor localization system for a mobile robot
Sep 24, 2020

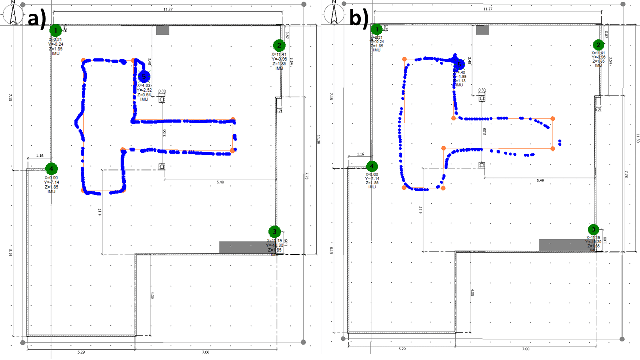

Although indoor localization has been a wide researched topic, obtained results may not fit the requirements that some domains need. Most approaches are not able to precisely localize a fast moving object even with a complex installation, which makes their implementation in the automated driving domain complicated. In this publication, common technologies were analyzed and a commercial product, called Marvelmind Indoor GPS, was chosen for our use case in which both ultrasound and radio frequency communications are used. The evaluation is given in a first moment on small indoor scenarios with static and moving objects. Further tests were done on wider areas, where the system is integrated within our Robotics Operating System (ROS)-based self-developed 'Smart PhysIcal Demonstration and evaluation Robot (SPIDER)' and the results of these outdoor tests are compared with the obtained localization by the installed GPS on the robot. Finally, the next steps to improve the results in further developments are discussed.