 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCommunication-Aware Energy Efficient Trajectory Planning with Limited Channel Knowledge
Nov 18, 2020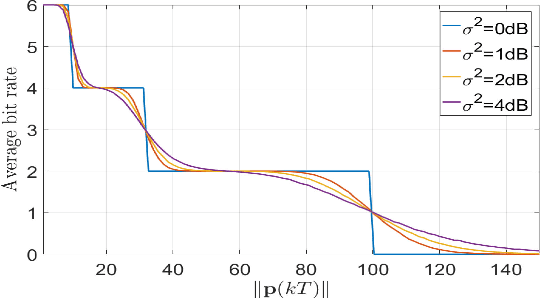
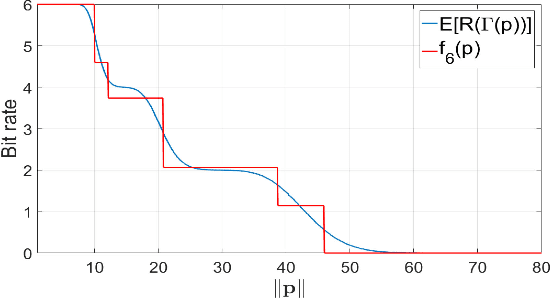
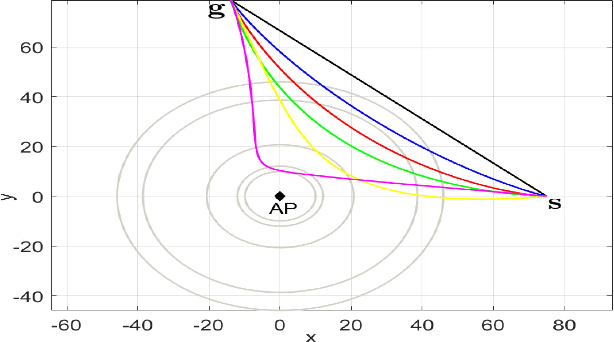
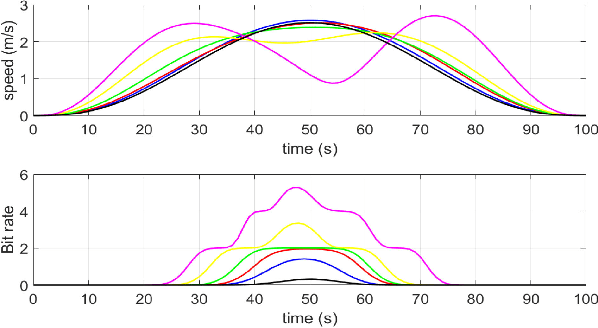
Wireless communications is nowadays an important aspect of robotics. There are many applications in which a robot must move to a certain goal point while transmitting information through a wireless channel which depends on the particular trajectory chosen by the robot to reach the goal point. In this context, we develop a method to generate optimum trajectories which allow the robot to reach the goal point using little mechanical energy while transmitting as much data as possible. This is done by optimizing the trajectory (path and velocity profile) so that the robot consumes less energy while also offering good wireless channel conditions. We consider a realistic wireless channel model as well as a realistic dynamic model for the mobile robot (considered here to be a drone). Simulations results illustrate the merits of the proposed method.
Learning control for transmission and navigation with a mobile robot under unknown communication rates
Nov 18, 2020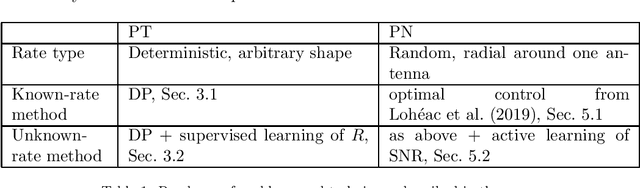
In tasks such as surveying or monitoring remote regions, an autonomous robot must move while transmitting data over a wireless network with unknown, position-dependent transmission rates. For such a robot, this paper considers the problem of transmitting a data buffer in minimum time, while possibly also navigating towards a goal position. Two approaches are proposed, each consisting of a machine-learning component that estimates the rate function from samples; and of an optimal-control component that moves the robot given the current rate function estimate. Simple obstacle avoidance is performed for the case without a goal position. In extensive simulations, these methods achieve competitive performance compared to known-rate and unknown-rate baselines. A real indoor experiment is provided in which a Parrot AR.Drone 2 successfully learns to transmit the buffer.