 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeContinuous locomotion mode recognition and gait phase estimation based on a shank-mounted IMU with artificial neural networks
Aug 01, 2022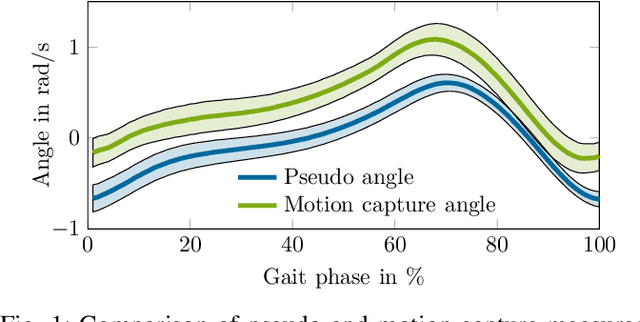
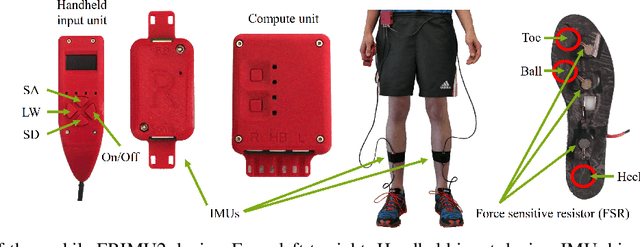
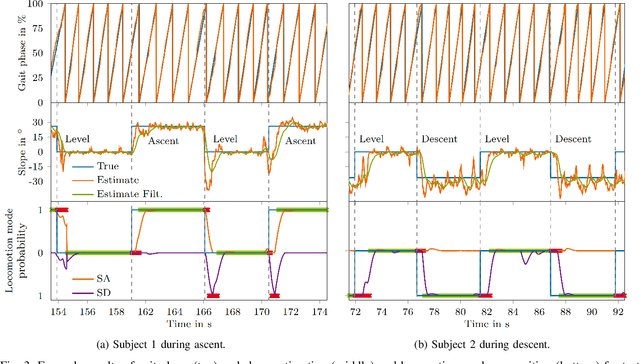
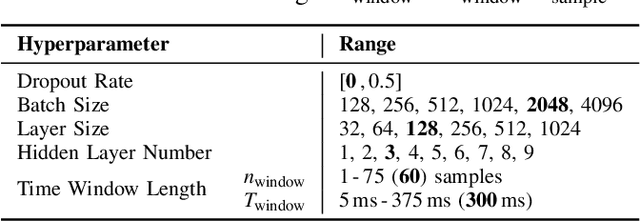
To improve the control of wearable robotics for gait assistance, we present an approach for continuous locomotion mode recognition as well as gait phase and stair slope estimation based on artificial neural networks that include time history information. The input features consist exclusively of processed variables that can be measured with a single shank-mounted inertial measurement unit. We introduce a wearable device to acquire real-world environment test data to demonstrate the performance and the robustness of the approach. Mean absolute error (gait phase, stair slope) and accuracy (locomotion mode) were determined for steady level walking and steady stair ambulation. Robustness was assessed using test data from different sensor hardware, sensor fixations, ambulation environments and subjects. The mean absolute error from the steady gait test data for the gait phase was 2.0-3.5 % for gait phase estimation and 3.3-3.8{\deg} for stair slope estimation. The accuracy of classifying the correct locomotion mode on the test data with the utilization of time history information was in between 98.51 % and 99.67 %. Results show high performance and robustness for continuously predicting gait phase, stair slope and locomotion mode during steady gait. As hypothesized, time history information improves the locomotion mode recognition. However, while the gait phase estimation performed well for untrained transitions between locomotion modes, our qualitative analysis revealed that it may be beneficial to include transition data into the training of the neural network to improve the prediction of the slope and the locomotion mode. Our results suggest that artificial neural networks could be used for high level control of wearable lower limb robotics.
UnScenE: Toward Unsupervised Scenario Extraction for Automated Driving Systems from Urban Naturalistic Road Traffic Data
Feb 14, 2022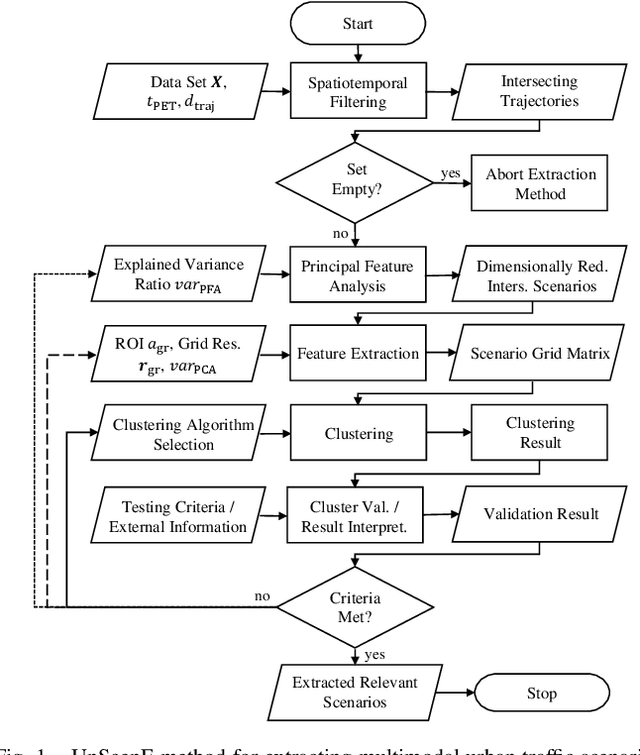
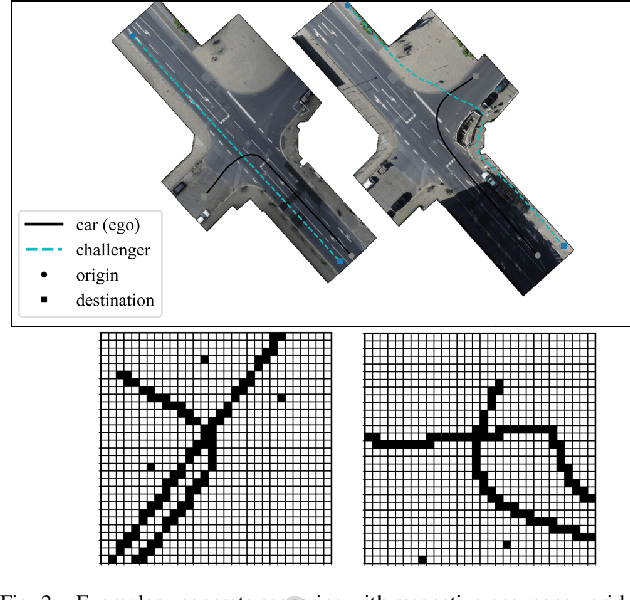
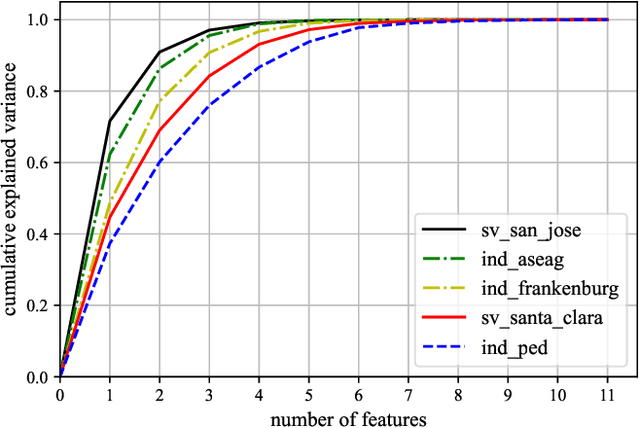
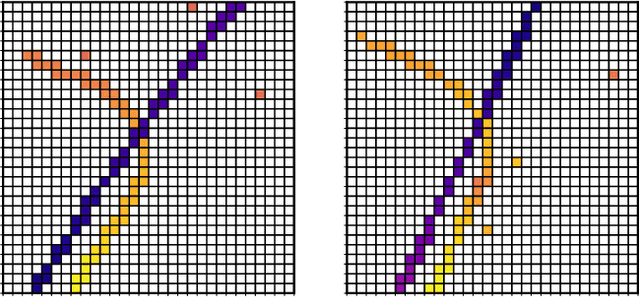
Scenario-based testing is a promising approach to solve the challenge of proving the safe behavior of vehicles equipped with automated driving systems (ADS). Since an infinite number of concrete scenarios can theoretically occur in real-world road traffic, the extraction of relevant scenarios that are sensitive regarding the safety-related behavior of ADS-equipped vehicles is a key aspect for the successful verification and validation of these systems. Therefore, this paper provides a method for extracting multimodal urban traffic scenarios from naturalistic road traffic data in an unsupervised manner for minimizing the amount of (potentially biased) prior expert knowledge needed. Rather than an (expensive) rule-based assignment by extracting concrete scenarios into predefined functional scenarios, the presented method deploys an unsupervised machine learning pipeline. It includes principal feature analysis, feature extraction with so-called scenario grids, dimensionality reduction by principal component analysis, scenario clustering as well as cluster validation. The approach allows exploring the unknown natures of the data and interpreting them as scenarios that experts could not have anticipated. The method is demonstrated and evaluated for naturalistic road traffic data at urban intersections from the inD and the Silicon Valley dataset. The findings encourage the use of this type of data as well as unsupervised machine learning approaches as important pillar for a systematic construction of a relevant scenario database with sufficient coverage for testing ADS.
Prediction of Highway Lane Changes Based on Prototype Trajectories
Jul 25, 2019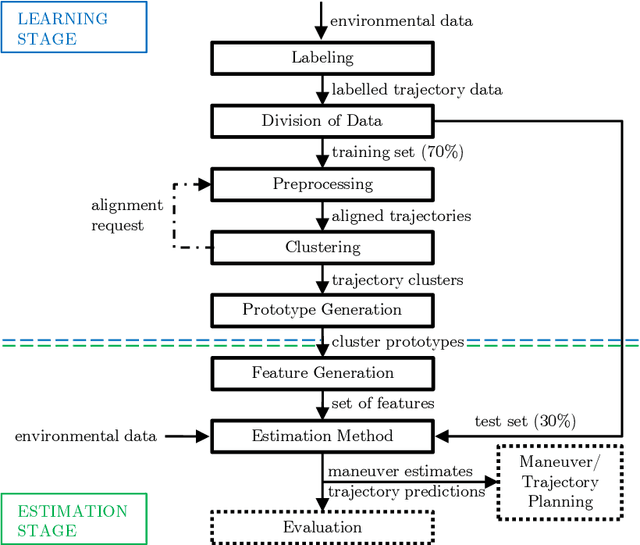
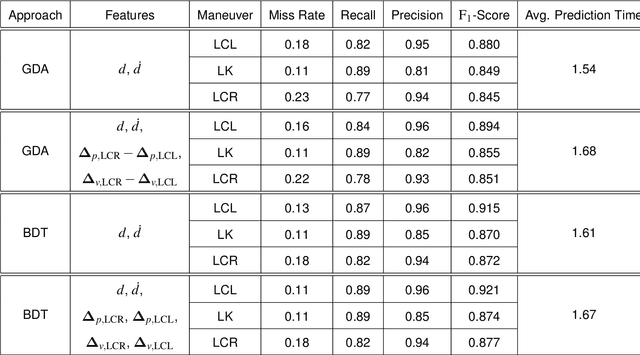
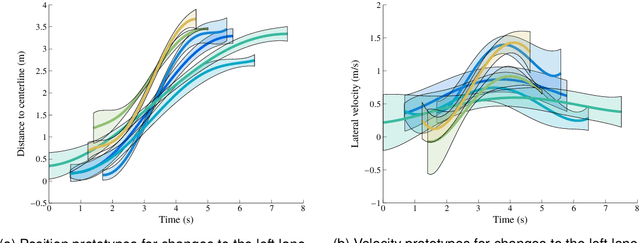
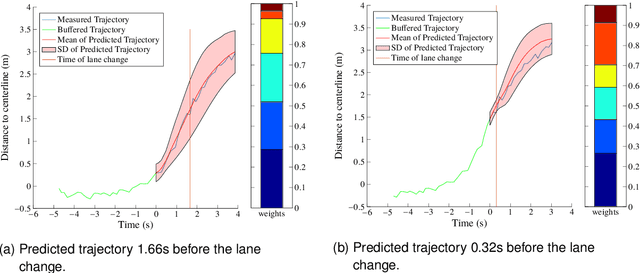
The vision of automated driving is to increase both road safety and efficiency, while offering passengers a convenient travel experience. This requires that autonomous systems correctly estimate the current traffic scene and its likely evolution. In highway scenarios early recognition of cut-in maneuvers is essential for risk-aware maneuver planning. In this paper, a statistical approach is proposed, which advantageously utilizes a set of prototypical lane change trajectories to realize both early maneuver detection and uncertainty-aware trajectory prediction for traffic participants. Generation of prototype trajectories from real traffic data is accomplished by Agglomerative Hierarchical Clustering. During clustering, the alignment of the cluster prototypes to each other is optimized and the cohesion of the resulting prototype is limited when two clusters merge. In the prediction stage, the similarity of observed vehicle motion and typical lane change patterns in the data base is evaluated to construct a set of significant features for maneuver classification via Boosted Decision Trees. The future trajectory is predicted combining typical lane change realizations in a mixture model. B-splines based trajectory adaptations guarantee continuity during transition from actually observed to predicted vehicle states. Quantitative evaluation results demonstrate the proposed concept's improved performance for both maneuver and trajectory prediction compared to a previously implemented reference approach.
* VDI AUTOREG 2019, 17 pages, 5 figures