 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHTN Plan Repair Algorithms Compared: Strengths and Weaknesses of Different Methods
Apr 22, 2025



This paper provides theoretical and empirical comparisons of three recent hierarchical plan repair algorithms: SHOPFixer, IPyHOPPER, and Rewrite. Our theoretical results show that the three algorithms correspond to three different definitions of the plan repair problem, leading to differences in the algorithms' search spaces, the repair problems they can solve, and the kinds of repairs they can make. Understanding these distinctions is important when choosing a repair method for any given application. Building on the theoretical results, we evaluate the algorithms empirically in a series of benchmark planning problems. Our empirical results provide more detailed insight into the runtime repair performance of these systems and the coverage of the repair problems solved, based on algorithmic properties such as replanning, chronological backtracking, and backjumping over plan trees.
Provenance-Based Assessment of Plans in Context
Nov 03, 2020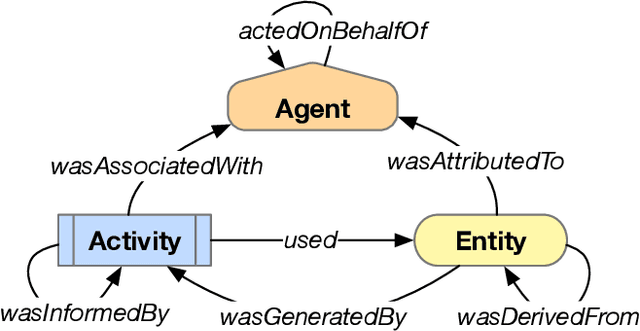
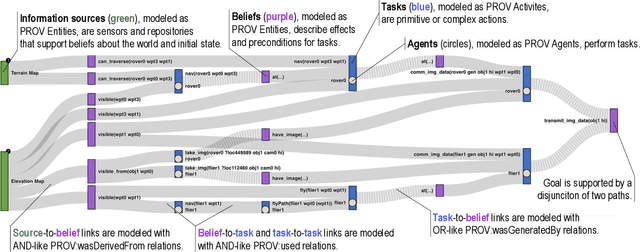
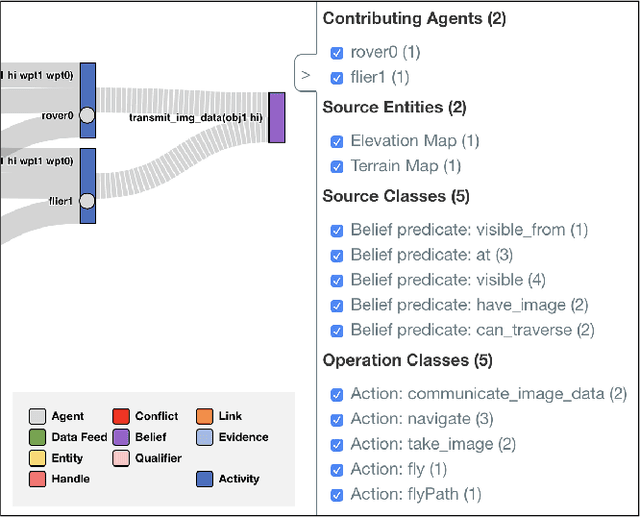
Many real-world planning domains involve diverse information sources, external entities, and variable-reliability agents, all of which may impact the confidence, risk, and sensitivity of plans. Humans reviewing a plan may lack context about these factors; however, this information is available during the domain generation, which means it can also be interwoven into the planner and its resulting plans. This paper presents a provenance-based approach to explaining automated plans. Our approach (1) extends the SHOP3 HTN planner to generate dependency information, (2) transforms the dependency information into an established PROV-O representation, and (3) uses graph propagation and TMS-inspired algorithms to support dynamic and counter-factual assessment of information flow, confidence, and support. We qualified our approach's explanatory scope with respect to explanation targets from the automated planning literature and the information analysis literature, and we demonstrate its ability to assess a plan's pertinence, sensitivity, risk, assumption support, diversity, and relative confidence.
* 9 pages, 7 figures, including in Proceedings of the 2020 ICAPS Workshop on Explainable AI Planning (XAIP)