 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrom a few Accurate 2D Correspondences to 3D Point Clouds
Jun 13, 2022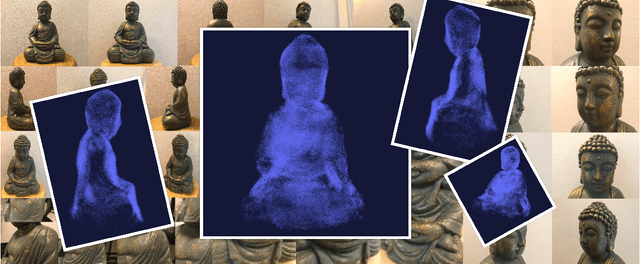
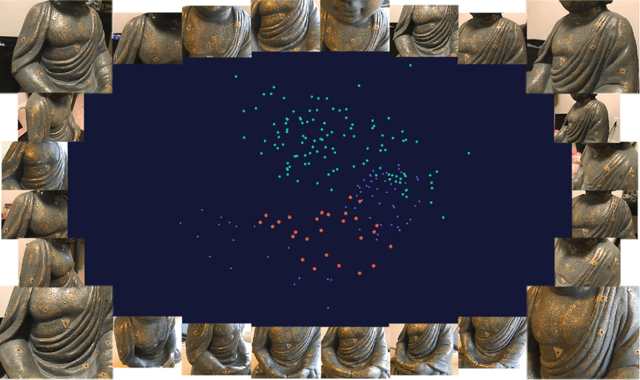

Key points, correspondences, projection matrices, point clouds and dense clouds are the skeletons in image-based 3D reconstruction, of which point clouds have the important role in generating a realistic and natural model for a 3D reconstructed object. To achieve a good 3D reconstruction, the point clouds must be almost everywhere in the surface of the object. In this article, with a main purpose to build the point clouds covering the entire surface of the object, we propose a new feature named a geodesic feature or geo-feature. Based on the new geo-feature, if there are several (given) initial world points on the object's surface along with all accurately estimated projection matrices, some new world points on the geodesics connecting any two of these given world points will be reconstructed. Then the regions on the surface bordering by these initial world points will be covered by the point clouds. Thus, if the initial world points are around the surface, the point clouds will cover the entire surface. This article proposes a new method to estimate the world points and projection matrices from their correspondences. This method derives the closed-form and iterative solutions for the world points and projection matrices and proves that when the number of world points is less than seven and the number of images is at least five, the proposed solutions are global optimal. We propose an algorithm named World points from their Correspondences (WPfC) to estimate the world points and projection matrices from their correspondences, and another algorithm named Creating Point Clouds (CrPC) to create the point clouds from the world points and projection matrices given by the first algorithm.
Multi-view Geometry: Correspondences Refinement Based on Algebraic Properties
May 03, 2022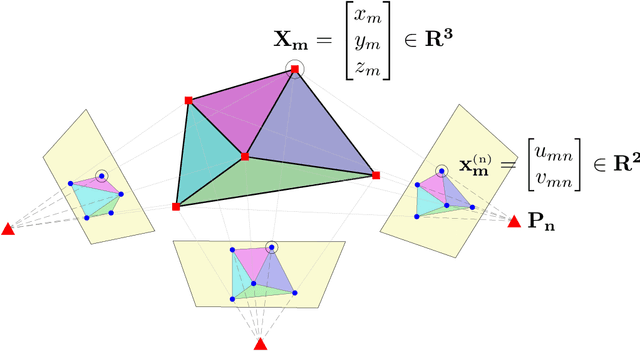
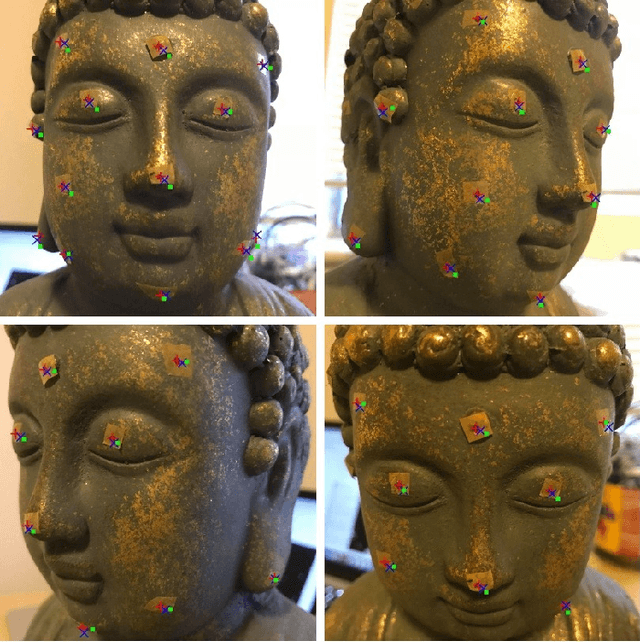
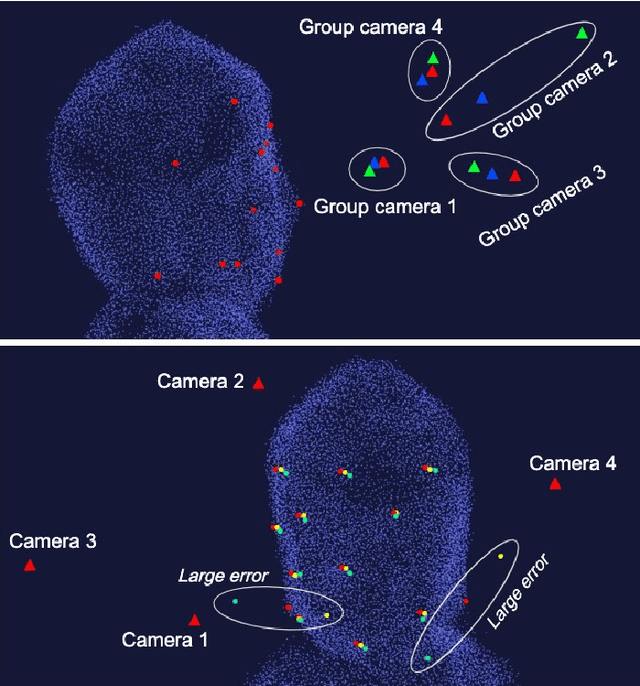

Correspondences estimation or feature matching is a key step in the image-based 3D reconstruction problem. In this paper, we propose two algebraic properties for correspondences. The first is a rank deficient matrix construct from the correspondences of at least nine key-points on two images (two-view correspondences) and the second is also another rank deficient matrix built from the other correspondences of six key-points on at least five images (multi-view correspondences). To our knowledge, there are no theoretical results for multi-view correspondences prior to this paper. To obtain accurate correspondences, multi-view correspondences seem to be more useful than two-view correspondences. From these two algebraic properties, we propose an refinement algorithm for correspondences. This algorithm is a combination of correspondences refinement, outliers recognition and missing key-points recovery. Real experiments from the project of reconstructing Buddha statue show that the proposed refinement algorithm can reduce the average error from 77 pixels to 55 pixels on the correspondences estimation. This drop is substantial and it validates our results.