 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Spiking Neural Architecture for Coordinating Arm and Locomotor Control
Jun 09, 2026Spiking Neural Networks (SNNs) coupled with neuromorphic hardware offer energy-efficient solutions for humanoid robot control. However, existing SNN-based motor control systems address bipedal locomotion and arm control in isolation, leaving integrated control of both unaddressed. We present a spiking architecture that coordinates force-based arm control and bipedal locomotion in a simulated humanoid, using the Neural Engineering Framework (NEF) and Semantic Pointer Architecture (SPA). High-level action selection between locomotor and arm control is mediated by a biologically grounded spiking basal ganglia model. We validate the system through co-simulation of Nengo, for the neural control, and Isaac Sim, demonstrating successful target reaching, continuous digit drawing, path-following locomotion, and finally, switching between walking and arm control via basal ganglia disinhibition. To our knowledge, this is the first integrated spiking controller to combine bipedal locomotion and arm control on a full-scale humanoid platform. The full spike-based implementation enables future deployment on low-power neuromorphic hardware.
Nengo and low-power AI hardware for robust, embedded neurorobotics
Aug 29, 2020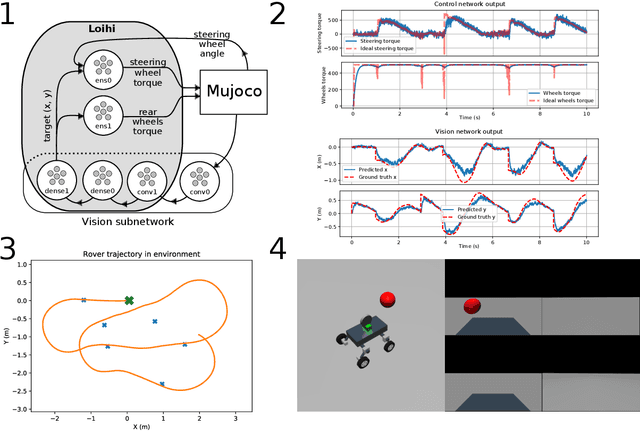
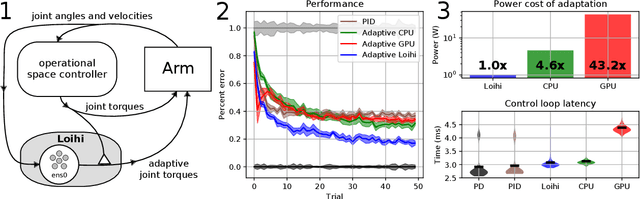
In this paper we demonstrate how the Nengo neural modeling and simulation libraries enable users to quickly develop robotic perception and action neural networks for simulation on neuromorphic hardware using familiar tools, such as Keras and Python. We identify four primary challenges in building robust, embedded neurorobotic systems: 1) developing infrastructure for interfacing with the environment and sensors; 2) processing task specific sensory signals; 3) generating robust, explainable control signals; and 4) compiling neural networks to run on target hardware. Nengo helps to address these challenges by: 1) providing the NengoInterfaces library, which defines a simple but powerful API for users to interact with simulations and hardware; 2) providing the NengoDL library, which lets users use the Keras and TensorFlow API to develop Nengo models; 3) implementing the Neural Engineering Framework, which provides white-box methods for implementing known functions and circuits; and 4) providing multiple backend libraries, such as NengoLoihi, that enable users to compile the same model to different hardware. We present two examples using Nengo to develop neural networks that run on CPUs, GPUs, and Intel's neuromorphic chip, Loihi, to demonstrate this workflow. The first example is an end-to-end spiking neural network that controls a rover simulated in Mujoco. The network integrates a deep convolutional network that processes visual input from mounted cameras to track a target, and a control system implementing steering and drive functions to guide the rover to the target. The second example augments a force-based operational space controller with neural adaptive control to improve performance during a reaching task using a real-world Kinova Jaco2 robotic arm. Code and details are provided with the intent of enabling other researchers to build their own neurorobotic systems.