 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTimewarpVAE: Simultaneous Time-Warping and Representation Learning of Trajectories
Oct 24, 2023



Human demonstrations of trajectories are an important source of training data for many machine learning problems. However, the difficulty of collecting human demonstration data for complex tasks makes learning efficient representations of those trajectories challenging. For many problems, such as for handwriting or for quasistatic dexterous manipulation, the exact timings of the trajectories should be factored from their spatial path characteristics. In this work, we propose TimewarpVAE, a fully differentiable manifold-learning algorithm that incorporates Dynamic Time Warping (DTW) to simultaneously learn both timing variations and latent factors of spatial variation. We show how the TimewarpVAE algorithm learns appropriate time alignments and meaningful representations of spatial variations in small handwriting and fork manipulation datasets. Our results have lower spatial reconstruction test error than baseline approaches and the learned low-dimensional representations can be used to efficiently generate semantically meaningful novel trajectories.
Local Disentanglement in Variational Auto-Encoders Using Jacobian $L_1$ Regularization
Jun 05, 2021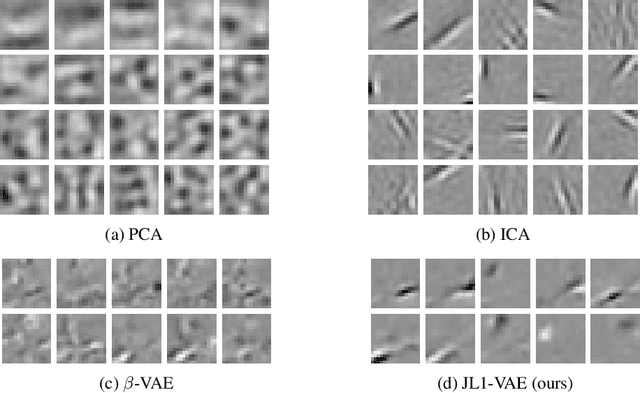

There have been many recent advances in representation learning; however, unsupervised representation learning can still struggle with model identification issues. Variational Auto-Encoders (VAEs) and their extensions such as $\beta$-VAEs have been shown to locally align latent variables with PCA directions, which can help to improve model disentanglement under some conditions. Borrowing inspiration from Independent Component Analysis (ICA) and sparse coding, we propose applying an $L_1$ loss to the VAE's generative Jacobian during training to encourage local latent variable alignment with independent factors of variation in the data. We demonstrate our results on a variety of datasets, giving qualitative and quantitative results using information theoretic and modularity measures that show our added $L_1$ cost encourages local axis alignment of the latent representation with individual factors of variation.