 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAgri-Query: A Case Study on RAG vs. Long-Context LLMs for Cross-Lingual Technical Question Answering
Aug 25, 2025We present a case study evaluating large language models (LLMs) with 128K-token context windows on a technical question answering (QA) task. Our benchmark is built on a user manual for an agricultural machine, available in English, French, and German. It simulates a cross-lingual information retrieval scenario where questions are posed in English against all three language versions of the manual. The evaluation focuses on realistic "needle-in-a-haystack" challenges and includes unanswerable questions to test for hallucinations. We compare nine long-context LLMs using direct prompting against three Retrieval-Augmented Generation (RAG) strategies (keyword, semantic, hybrid), with an LLM-as-a-judge for evaluation. Our findings for this specific manual show that Hybrid RAG consistently outperforms direct long-context prompting. Models like Gemini 2.5 Flash and the smaller Qwen 2.5 7B achieve high accuracy (over 85%) across all languages with RAG. This paper contributes a detailed analysis of LLM performance in a specialized industrial domain and an open framework for similar evaluations, highlighting practical trade-offs and challenges.
RB-Dust -- A Reference-based Dataset for Vision-based Dust Removal
Jun 12, 2023Dust in the agricultural landscape is a significant challenge and influences, for example, the environmental perception of autonomous agricultural machines. Image enhancement algorithms can be used to reduce dust. However, these require dusty and dust-free images of the same environment for validation. In fact, to date, there is no dataset that we are aware of that addresses this issue. Therefore, we present the agriscapes RB-Dust dataset, which is named after its purpose of reference-based dust removal. It is not possible to take pictures from the cabin during tillage, as this would cause shifts in the images. Because of this, we built a setup from which it is possible to take images from a stationary position close to the passing tractor. The test setup was based on a half-sided gate through which the tractor could drive. The field tests were carried out on a farm in Bavaria, Germany, during tillage. During the field tests, other parameters such as soil moisture and wind speed were controlled, as these significantly affect dust development. We validated our dataset with contrast enhancement and image dehazing algorithms and analyzed the generalizability from recordings from the moving tractor. Finally, we demonstrate the application of dust removal based on a high-level vision task, such as person classification. Our empirical study confirms the validity of RB-Dust for vision-based dust removal in agriculture.
Computer Vision-Based Guidance Assistance Concept for Plowing Using RGB-D Camera
Jul 27, 2021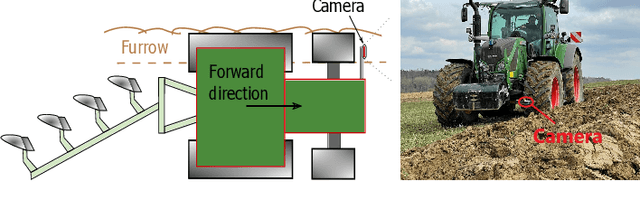
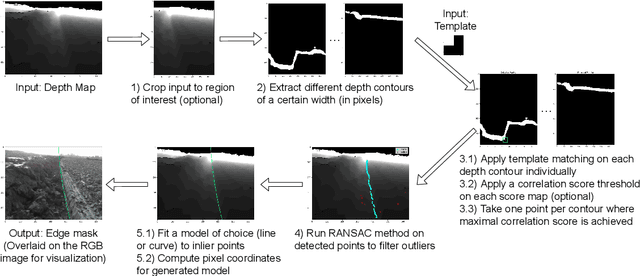
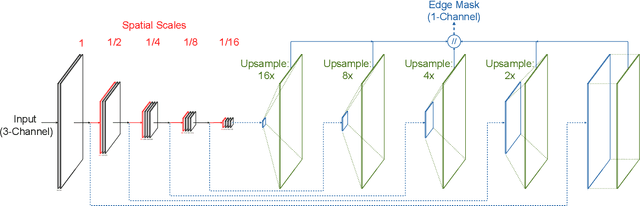
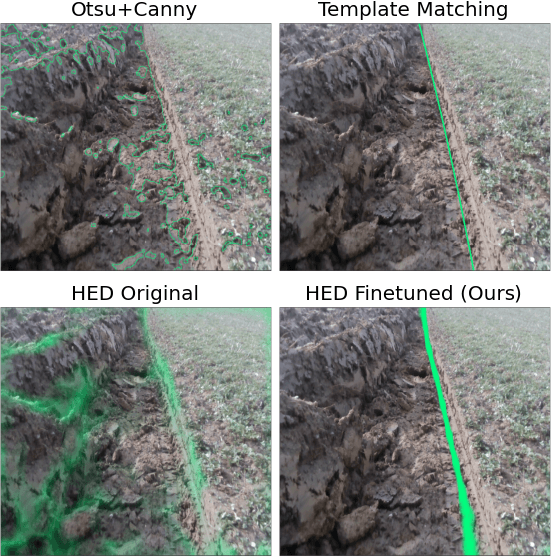
This paper proposes a concept of computer vision-based guidance assistance for agricultural vehicles to increase the accuracy in plowing and reduce driver's cognitive burden in long-lasting tillage operations. Plowing is a common agricultural practice to prepare the soil for planting in many countries and it can take place both in the spring and the fall. Since plowing operation requires high traction forces, it causes increased energy consumption. Moreover, longer operation time due to unnecessary maneuvers leads to higher fuel consumption. To provide necessary information for the driver and the control unit of the tractor, a first concept of furrow detection system based on an RGB-D camera was developed.