 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomy for Ferries and Harbour Buses: a Collision Avoidance Perspective
Jan 06, 2023



This paper provides a collision avoidance perspective to maritime autonomy, in the shift towards Maritime Autonomous Surface Ships (MASS). In particular, the paper presents the developments related to the Greenhoper, a Danish autonomous harbour bus. The collision and grounding avoidance scheme, called the Short Horizon Planner (SHP), is described and discussed in detail. Furthermore, the required autonomy stack for facilitating safe and rule-compliant collision avoidance is presented. The inherent difficulties relating to adhering to the COLREGs are outlined, highlighting some of the operational constraints and challenges within the space of autonomous ferries and harbour buses. Finally, collision and grounding avoidance is demonstrated using a simulation of the entire proposed autonomy stack.
Informed Sampling-based Collision Avoidance with Least Deviation from the Nominal Path
Oct 24, 2022



This paper addresses local path re-planning for $n$-dimensional systems by introducing an informed sampling scheme and cost function to achieve collision avoidance with minimum deviation from an (optimal) nominal path. The proposed informed subset consists of the union of ellipsoids along the specified nominal path, such that the subset efficiently encapsulates all points along the nominal path. The cost function penalizes large deviations from the nominal path, thereby ensuring current safety in the face of potential collisions while retaining most of the overall efficiency of the nominal path. The proposed method is demonstrated on scenarios related to the navigation of autonomous marine crafts.
Autonomous Navigation in Confined Waters -- A COLREGs Rule 9 Compliant Framework
Jul 17, 2022
Fully or partial autonomous marine vessels are actively being developed by many industry actors. In many cases, the autonomous vessels will be operating close to shore, and within range of a Remote Control Center (RCC). Close to shore operation requires that the autonomous vessel is able to navigate in close proximity to other autonomous or manned vessels, and possibly in confined waters, while obeying the COLREGs on equal terms as any other vessel at sea. In confined waters however, certain COLREGs rules apply, which might alter the expected actions (give-way or stand-on), depending on the manoeuvrability of the vessels. This paper presents a Situation Awareness (SAS) framework for autonomous navigation that complies with COLREGs rule 9 (Narrow Channels). The proposed solution comprises a method for evaluating the manoeuvrability of a vessel in confined waters, for assessing the applicability of COLREGs rule 9. This feature is then integrated into an already existing SAS framework for facilitating COLREGs-compliant navigation in restricted waters. The applicability of the proposed method is demonstrated in simulation using a case study of a small autonomous passenger ferry.
Guaranteed Rejection-free Sampling Method Using Past Behaviours for Motion Planning of Autonomous Systems
Sep 29, 2021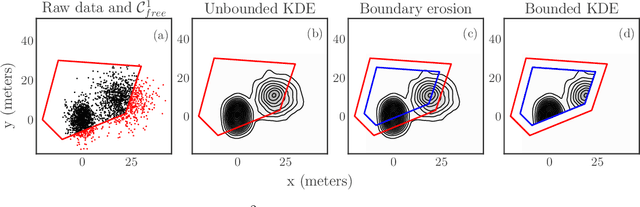
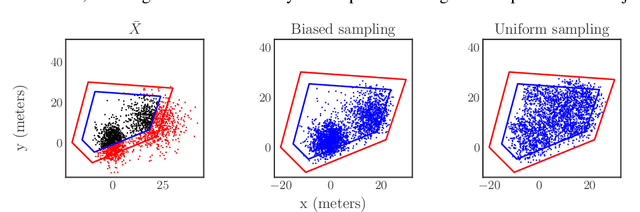
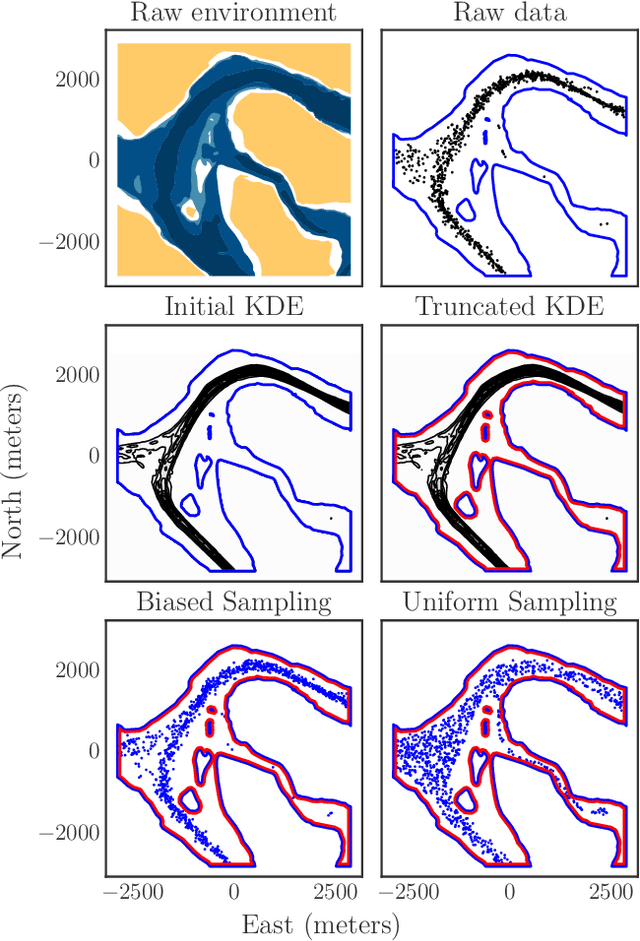
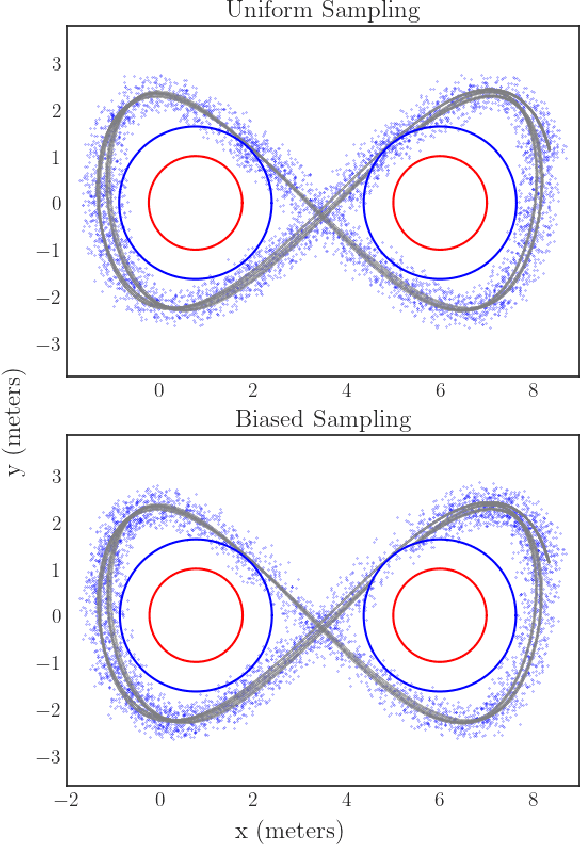
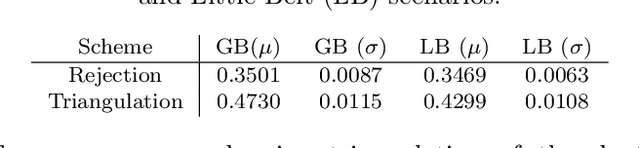
The paper presents a novel learning-based sampling strategy that guarantees rejection-free sampling of the free space in both biased and uniform conditions. Data of past configurations of the autonomous system performing a repetitive task is leveraged to estimate a non-parametric probabilistic description of the region of the free space where feasible solutions of the motion planning problem are likely to be found. The tuning parameters of the kernel density estimator -- the bandwidth and the kernel -- are then used to properly alter the description of the free space such that no sampled configuration can fall outside the original free space. The paper demonstrates the proposed method on two case studies: the first showcases the sampling strategies on 2D historical data from real surface vessels, whereas the second applies the method on 3D drone data gathered from a real quadrotor system. Both instances show that the proposed biased and approximately uniform sampling schemes are able to guarantee rejection-free sampling of the considered workspaces.
Grounding-aware RRT* for Path Planning and Safe Navigation of Marine Crafts in Confined Waters
Sep 14, 2021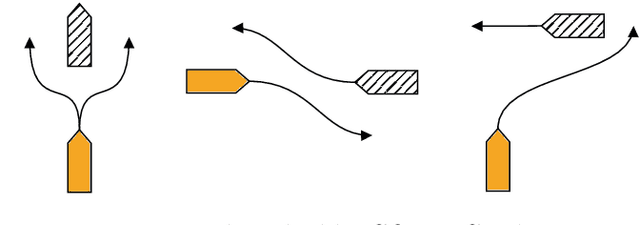
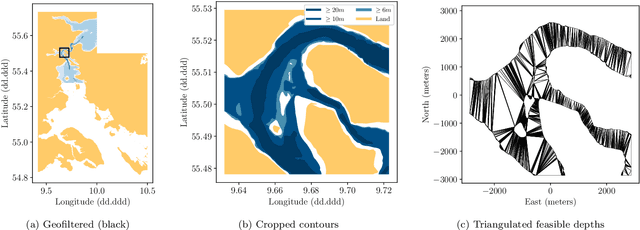
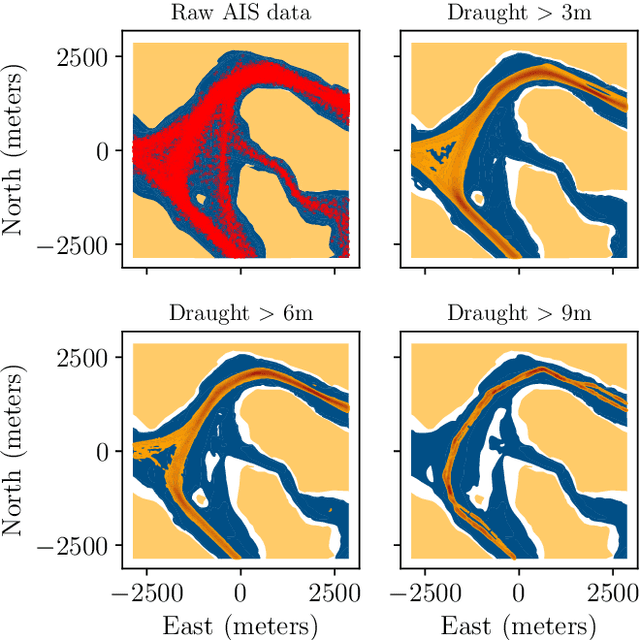
The paper presents a path planning algorithm based on RRT* that addresses the risk of grounding during evasive manoeuvres to avoid collision. The planner achieves this objective by integrating a collective navigation experience with the systematic use of water depth information from the electronic navigational chart. Multivariate kernel density estimation is applied to historical AIS data to generate a probabilistic model describing seafarer's best practices while sailing in confined waters. This knowledge is then encoded into the RRT* cost function to penalize path deviations that would lead own ship to sail in shallow waters. Depth contours satisfying the own ship draught define the actual navigable area, and triangulation of this non-convex region is adopted to enable uniform sampling. This ensures the optimal path deviation.