 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRuntime Enforcement of Hybrid System Properties
Jun 10, 2026Runtime enforcement has emerged as a promising approach for ensuring the safety of autonomous and cyber-physical systems operating in uncertain and dynamic environments. Unlike traditional runtime verification, runtime enforcement actively intervenes during execution to prevent property violations by modifying unsafe system behaviors. Existing enforcement frameworks primarily focus on untimed or discrete-time specifications and are often limited to delaying or suppressing events, making them inadequate for reactive systems exhibiting complex continuous dynamics. In this paper, we propose a runtime enforcement framework where safety requirements are modeled using Hybrid Automata (HA). The framework combines discrete-event editing with continuous-time monitoring to support enforcement actions such as suppression, delay, and insertion of events at arbitrary time instants. Upon observing environmental inputs, the automaton is initialized, and runtime reachability analysis is used to synthesize safe corrective actions. We formally define the enforcement problem for safety hybrid automata, establish enforceability conditions, and present an online enforcement algorithm for reactive systems. A detailed case study on an Adaptive Cruise Control (ACC) system demonstrates the effectiveness of the proposed approach in maintaining safety properties under unsafe controller behaviors. Experimental results show that the framework introduces minimal computational overhead while ensuring continuous compliance with safety requirements in real time.
Online Test Synthesis From Requirements: Enhancing Reinforcement Learning with Game Theory
Jul 26, 2024We consider the automatic online synthesis of black-box test cases from functional requirements specified as automata for reactive implementations. The goal of the tester is to reach some given state, so as to satisfy a coverage criterion, while monitoring the violation of the requirements. We develop an approach based on Monte Carlo Tree Search, which is a classical technique in reinforcement learning for efficiently selecting promising inputs. Seeing the automata requirements as a game between the implementation and the tester, we develop a heuristic by biasing the search towards inputs that are promising in this game. We experimentally show that our heuristic accelerates the convergence of the Monte Carlo Tree Search algorithm, thus improving the performance of testing.
Active learning of timed automata with unobservable resets
Jul 08, 2020

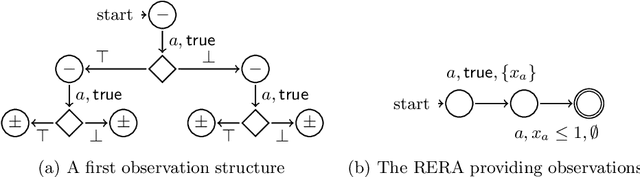
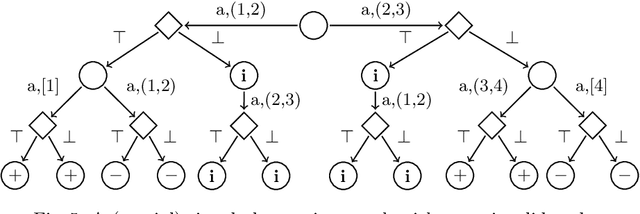
Active learning of timed languages is concerned with the inference of timed automata from observed timed words. The agent can query for the membership of words in the target language, or propose a candidate model and verify its equivalence to the target. The major difficulty of this framework is the inference of clock resets, central to the dynamics of timed automata, but not directly observable. Interesting first steps have already been made by restricting to the subclass of event-recording automata, where clock resets are tied to observations. In order to advance towards learning of general timed automata, we generalize this method to a new class, called reset-free event-recording automata, where some transitions may reset no clocks. This offers the same challenges as generic timed automata while keeping the simpler framework of event-recording automata for the sake of readability. Central to our contribution is the notion of invalidity, and the algorithm and data structures to deal with it, allowing on-the-fly detection and pruning of reset hypotheses that contradict observations, a key to any efficient active-learning procedure for generic timed automata.