 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBallistic Multibody Estimator for 2D Open Kinematic Chain
Nov 07, 2021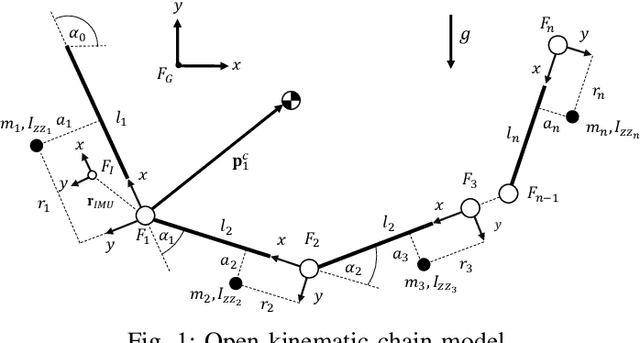
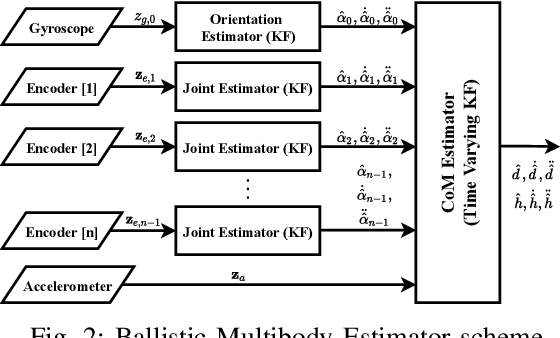
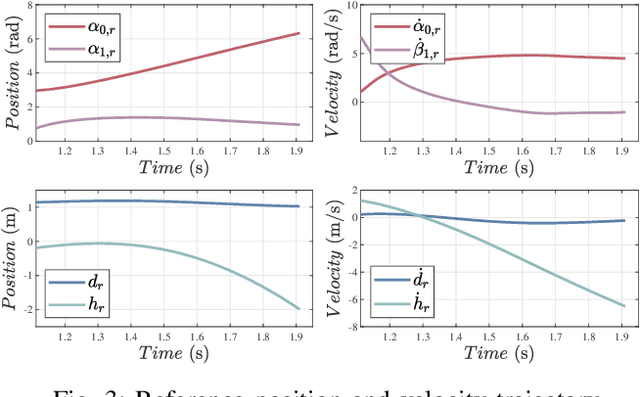
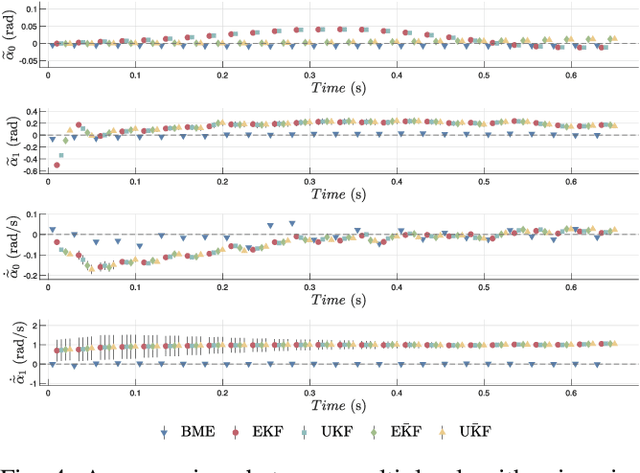
Applications of free-flying robots range from entertainment purposes to aerospace applications. The control algorithm for such systems requires accurate estimation of their states based on sensor feedback. The objective of this paper is to design and verify a lightweight state estimation algorithm for a free-flying open kinematic chain that estimates the state of its center-of-mass and its posture. Instead of utilizing a nonlinear dynamics model, this research proposes a cascade structure of two Kalman filters (KF), which relies on the information from the ballistic motion of free-falling multibody systems together with feedback from an inertial measurement unit (IMU) and encoders. Multiple algorithms are verified in the simulation that mimics real-world circumstances with Simulink. Several uncertain physical parameters are varied, and the result shows that the proposed estimator outperforms EKF and UKF in terms of tracking performance and computational time.
Flying Trapeze Act Motion Planning Algorithm for Two-Link Free-Flying Acrobatic Robot
Nov 06, 2021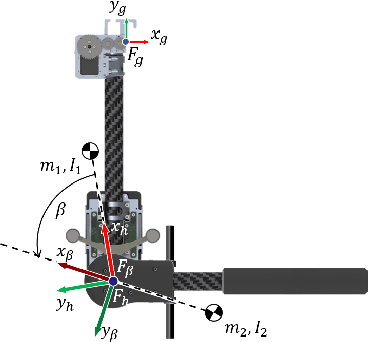
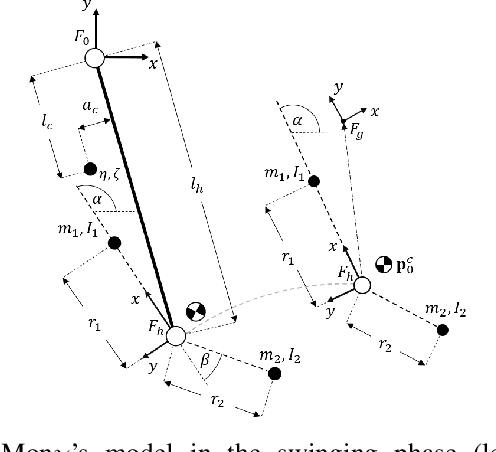
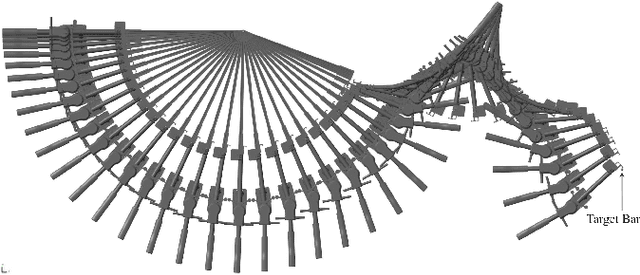
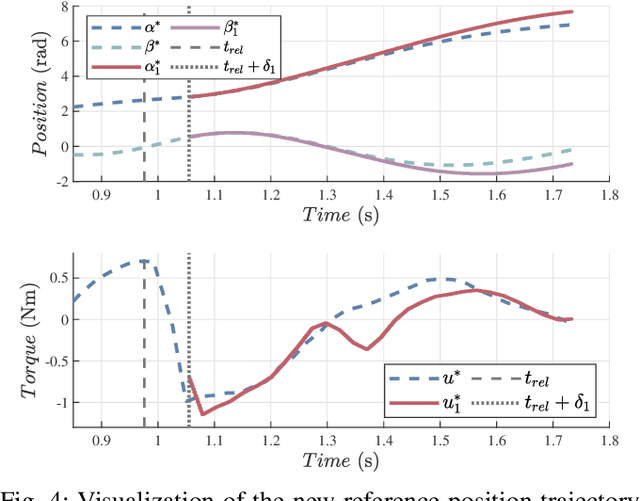
A flying trapeze act can be a challenging task for a robotics system since some act requires the performer to catch another trapeze or catcher at the end after being airborne. The objective of this paper is to design and validate a motion planning algorithm for a two-link free-flying acrobatic robot that can accurately land on another trapeze after free-flying in the air. First, the proposed algorithm plan the robot trajectory with the non-linear constrained optimization method. Then, a feedback controller is implemented to stabilize the posture. However, since the spatial position of the center-of-mass of the robot cannot be controlled, this paper proposes a trajectory correction scheme that manipulates the robot's posture such that the robot is still able to land on the target. Lastly, the whole algorithm is validated in the simulation that mimics real-world circumstances.