 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUncertainty-Aware and Decoder-Aligned Learning for Video Summarization
May 10, 2026Video summarization aims to produce a compact representation of a long video by selecting a subset of temporally important segments that best reflect human preferences. This task is inherently difficult due to strong annotation subjectivity and the reliance on discrete decoding procedures, such as temporal segmentation and knapsack-based selection, during evaluation. Most existing approaches either learn deterministic importance scores that overlook these characteristics or adopt complex generative models that increase training and inference cost. In this paper, we propose VASTSum, an uncertainty-aware and decoder-aligned learning framework for video summarization that addresses both challenges within a single-pass model. The proposed method predicts probabilistic frame-level importance scores using a variational formulation, enabling explicit modeling of uncertainty arising from multi-annotator supervision. To account for subjectivity, particularly under binary annotations, we employ a supervision strategy that encourages alignment with plausible human annotation modes rather than enforcing a single consensus target. Furthermore, we introduce a decoder-aligned regularization that promotes stability of knapsack-based summary selection, reducing sensitivity to small perturbations in predicted scores. We evaluate the proposed framework on the SumMe and TVSum benchmarks using standard rank-based metrics. Experimental results show consistent and competitive Kendall and Spearman correlations across multiple data splits, demonstrating improved robustness under annotation disagreement while maintaining efficient single-forward inference. These results indicate that explicitly modeling uncertainty and aligning learning objectives with the decoding stage provide a principled alternative to both deterministic and diffusion-based video summarization methods.
Embedded Quantum Machine Learning in Embedded Systems: Feasibility, Hybrid Architectures, and Quantum Co-Processors
Mar 13, 2026Embedded quantum machine learning (EQML) seeks to bring quantum machine learning (QML) capabilities to resource-constrained edge platforms such as IoT nodes, wearables, drones, and cyber-physical controllers. In 2026, EQML is technically feasible only in limited and highly experimental forms: (i) hybrid workflows where an embedded device performs sensing and classical processing while offloading a narrowly scoped quantum subroutine to a remote quantum processing unit (QPU) or nearby quantum appliance, and (ii) early-stage "embedded QPU" concepts in which a compact quantum co-processor is integrated with classical control hardware. A practical bridge is quantum-inspired machine learning and optimisation on classical embedded processors and FPGAs. This paper analyses feasibility from a circuits-and-systems perspective aligned with the academic community, formalises two implementation pathways, identifies the dominant barriers (latency, data encoding overhead, NISQ noise, tooling mismatch, and energy), and maps them to concrete engineering directions in interface design, control electronics, power management, verification, and security. We also argue that responsible deployment requires adversarial evaluation and governance practices that are increasingly necessary for edge AI systems.
EdgeDAM: Real-time Object Tracking for Mobile Devices
Mar 05, 2026Single-object tracking (SOT) on edge devices is a critical computer vision task, requiring accurate and continuous target localization across video frames under occlusion, distractor interference, and fast motion. However, recent state-of-the-art distractor-aware memory mechanisms are largely built on segmentation-based trackers and rely on mask prediction and attention-driven memory updates, which introduce substantial computational overhead and limit real-time deployment on resource-constrained hardware; meanwhile, lightweight trackers sustain high throughput but are prone to drift when visually similar distractors appear. To address these challenges, we propose EdgeDAM, a lightweight detection-guided tracking framework that reformulates distractor-aware memory for bounding-box tracking under strict edge constraints. EdgeDAM introduces two key strategies: (1) Dual-Buffer Distractor-Aware Memory (DAM), which integrates a Recent-Aware Memory to preserve temporally consistent target hypotheses and a Distractor-Resolving Memory to explicitly store hard negative candidates and penalize their re-selection during recovery; and (2) Confidence-Driven Switching with Held-Box Stabilization, where tracker reliability and temporal consistency criteria adaptively activate detection and memory-guided re-identification during occlusion, while a held-box mechanism temporarily freezes and expands the estimate to suppress distractor contamination. Extensive experiments on five benchmarks, including the distractor-focused DiDi dataset, demonstrate improved robustness under occlusion and fast motion while maintaining real-time performance on mobile devices, achieving 88.2% accuracy on DiDi and 25 FPS on an iPhone 15. Code will be released.
Real-Time Trash Detection for Modern Societies using CCTV to Identifying Trash by utilizing Deep Convolutional Neural Network
Sep 21, 2021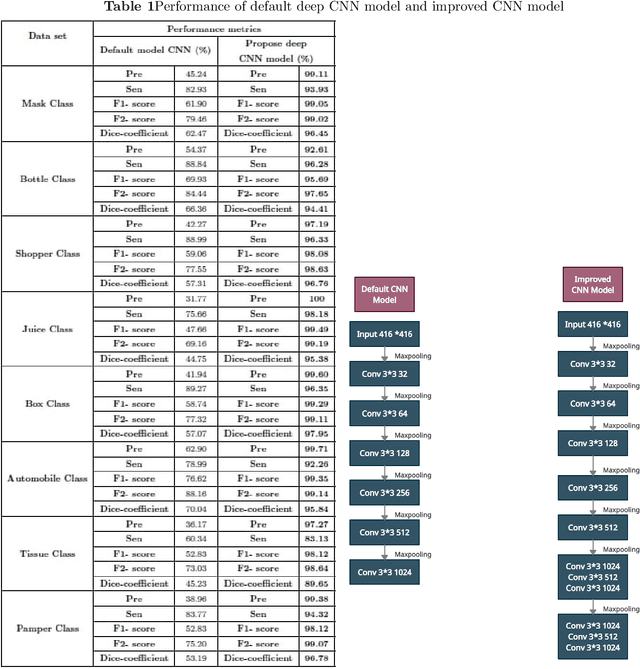
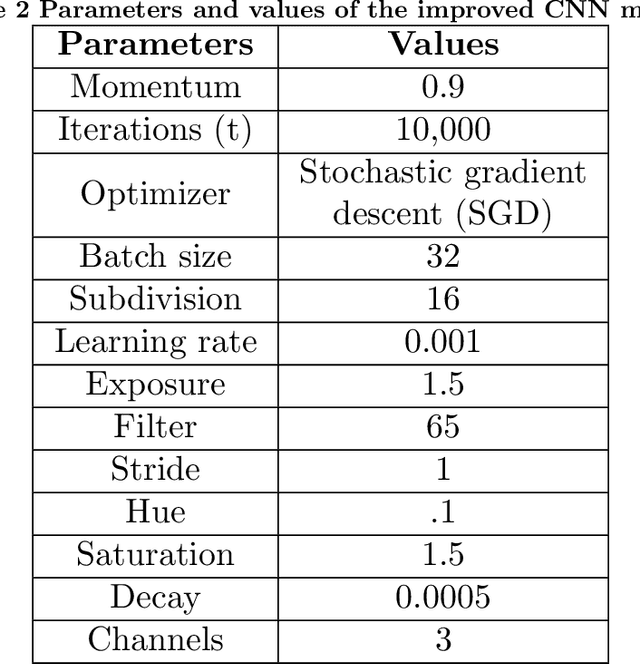
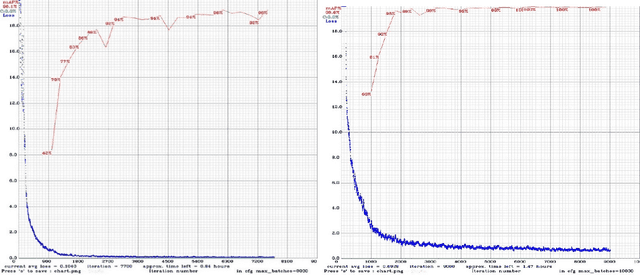
To protect the environment from trash pollution, especially in societies, and to take strict action against the red-handed people who throws the trash. As modern societies are developing and these societies need a modern solution to make the environment clean. Artificial intelligence (AI) evolution, especially in Deep Learning, gives an excellent opportunity to develop real-time trash detection using CCTV cameras. The inclusion of this project is real-time trash detection using a deep model of Convolutional Neural Network (CNN). It is used to obtain eight classes mask, tissue papers, shoppers, boxes, automobile parts, pampers, bottles, and juices boxes. After detecting the trash, the camera records the video of that person for ten seconds who throw trash in society. The challenging part of this paper is preparing a complex custom dataset that took too much time. The dataset consists of more than 2100 images. The CNN model was created, labeled, and trained. The detection time accuracy and average mean precision (mAP) benchmark both models' performance. In experimental phase the mAP performance and accuracy of the improved CNN model was superior in all aspects. The model is used on a CCTV camera to detect trash in real-time.