 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAmortized Bayesian inference for actigraph time sheet data from mobile devices
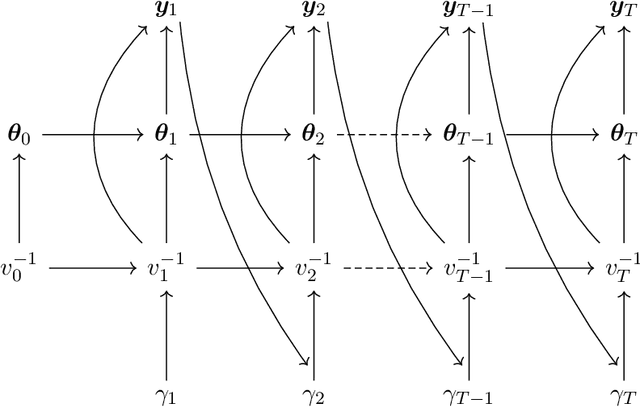
Feb 24, 2026Mobile data technologies use ``actigraphs'' to furnish information on health variables as a function of a subject's movement. The advent of wearable devices and related technologies has propelled the creation of health databases consisting of human movement data to conduct research on mobility patterns and health outcomes. Statistical methods for analyzing high-resolution actigraph data depend on the specific inferential context, but the advent of Artificial Intelligence (AI) frameworks require that the methods be congruent to transfer learning and amortization. This article devises amortized Bayesian inference for actigraph time sheets. We pursue a Bayesian approach to ensure full propagation of uncertainty and its quantification using a hierarchical dynamic linear model. We build our analysis around actigraph data from the Physical Activity through Sustainable Transport Approaches in Los Angeles (PASTA-LA) study conducted by the Fielding School of Public Health in the University of California, Los Angeles. Apart from achieving probabilistic imputation of actigraph time sheets, we are also able to statistically learn about the time-varying impact of explanatory variables on the magnitude of acceleration (MAG) for a cohort of subjects.
Dynamic Bayesian Learning and Calibration of Spatiotemporal Mechanistic Systems
Aug 25, 2022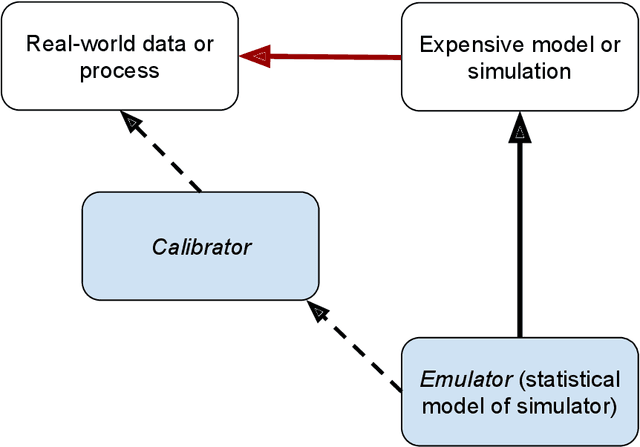
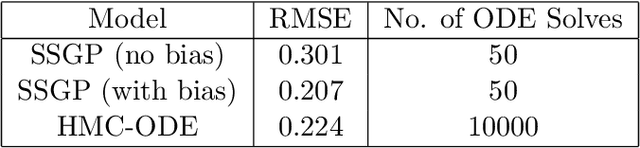

We develop an approach for fully Bayesian learning and calibration of spatiotemporal dynamical mechanistic models based on noisy observations. Calibration is achieved by melding information from observed data with simulated computer experiments from the mechanistic system. The joint melding makes use of both Gaussian and non-Gaussian state-space methods as well as Gaussian process regression. Assuming the dynamical system is controlled by a finite collection of inputs, Gaussian process regression learns the effect of these parameters through a number of training runs, driving the stochastic innovations of the spatiotemporal state-space component. This enables efficient modeling of the dynamics over space and time. Through reduced-rank Gaussian processes and a conjugate model specification, our methodology is applicable to large-scale calibration and inverse problems. Our method is general, extensible, and capable of learning a wide range of dynamical systems with potential model misspecification. We demonstrate this flexibility through solving inverse problems arising in the analysis of ordinary and partial nonlinear differential equations and, in addition, to a black-box computer model generating spatiotemporal dynamics across a network.
Modeling Massive Spatial Datasets Using a Conjugate Bayesian Linear Regression Framework
Sep 09, 2021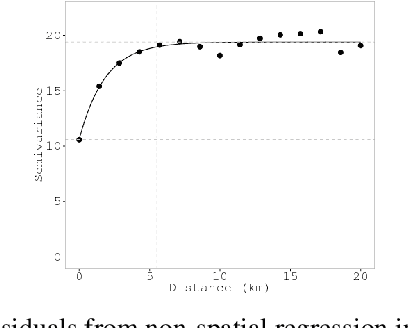
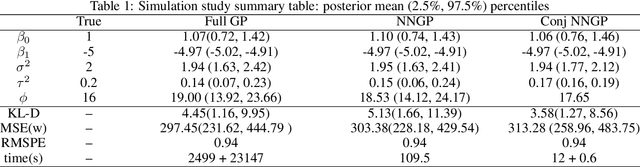
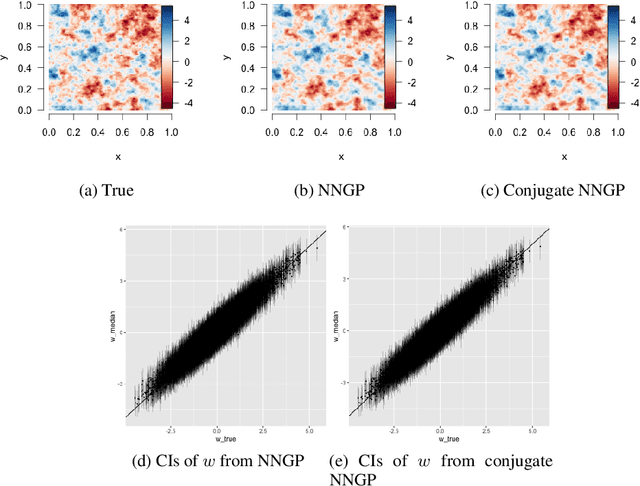
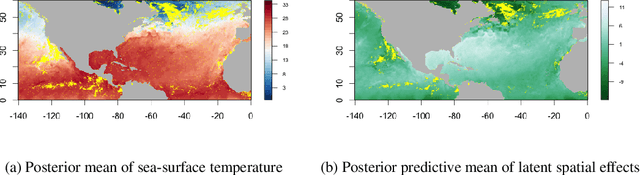
Geographic Information Systems (GIS) and related technologies have generated substantial interest among statisticians with regard to scalable methodologies for analyzing large spatial datasets. A variety of scalable spatial process models have been proposed that can be easily embedded within a hierarchical modeling framework to carry out Bayesian inference. While the focus of statistical research has mostly been directed toward innovative and more complex model development, relatively limited attention has been accorded to approaches for easily implementable scalable hierarchical models for the practicing scientist or spatial analyst. This article discusses how point-referenced spatial process models can be cast as a conjugate Bayesian linear regression that can rapidly deliver inference on spatial processes. The approach allows exact sampling directly (avoids iterative algorithms such as Markov chain Monte Carlo) from the joint posterior distribution of regression parameters, the latent process and the predictive random variables, and can be easily implemented on statistical programming environments such as R.