 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutomated Detection of hidden Damages and Impurities in Aluminum Die Casting Materials and Fibre-Metal Laminates using Low-quality X-ray Radiography, Synthetic X-ray Data Augmentation by Simulation, and Machine Learning
Nov 17, 2023



Detection and characterization of hidden defects, impurities, and damages in layered composites like Fibre laminates, e.g., Fibre Metal Laminates (FML), as well as in monolithic materials, e.g., aluminum die casting materials, is still a challenge. This work discusses methods and challenges in data-driven modeling of automated damage and defect detectors using X-ray single- and multi-projection (CT) images. Three main issues are identified: Data and feature variance, data feature labeling (for supervised machine learning), and the missing ground truth. It will be shown that only simulation of data can deliver a ground truth data set and accurate labeling. Noise has significant impact on the feature detection and will be discussed. Data-driven feature detectors are implemented with semantic pixel- or z-profile Convolutional Neural Networks and LSTM Auto-encoders. Data is measured with three different devices: A low-quality and low-cost (Low-Q), a mid- and a high-quality (micro-CT, Mid-/High-Q) device. The goals of this work are the training of robust and generalized feature detectors with synthetic data and the transition from High- and Mid-Q laboratory measuring technologies towards in-field usable technologies and methods.
Virtualization of Tiny Embedded Systems with a robust real-time capable and extensible Stack Virtual Machine REXAVM supporting Material-integrated Intelligent Systems and Tiny Machine Learning
Feb 17, 2023In the past decades, there has been a significant increase in sensor density and sensor deployment, driven by a significant miniaturization and decrease in size down to the chip level, addressing ubiquitous computing, edge computing, as well as distributed sensor networks. Material-integrated and intelligent systems (MIIS) provide the next integration and application level, but they create new challenges and introduce hard constraints (resources, energy supply, communication, resilience, and security). Commonly, low-resource systems are statically programmed processors with application-specific software or application-specific hardware (FPGA). This work demonstrates the need for and solution to virtualization in such low-resource and constrained systems towards resilient distributed sensor and cyber-physical networks using a unified low-resource, customizable, and real-time capable embedded and extensible stack virtual machine (REXAVM) that can be implemented and cooperate in both software and hardware. In a holistic architecture approach, the VM specifically addresses digital signal processing and tiny machine learning. The REXAVM is highly customizable through the use of VM program code generators at compile time and incremental code processing at run time. The VM uses an integrated, highly efficient just-in-time compiler to create Bytecode from text code. This paper shows and evaluates the suitability of the proposed VM architecture for operationally equivalent software and hardware (FPGA) implementations. Specific components supporting tiny ML and DSP using fixed-point arithmetic with respect to efficiency and accuracy are discussed. An extended use-case section demonstrates the usability of the introduced VM architecture for a broad range of applications.
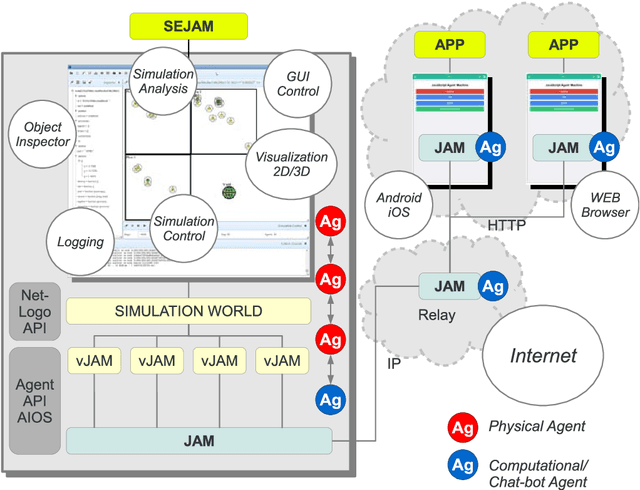
JAM: The JavaScript Agent Machine for Distributed Computing and Simulation with reactive and mobile Multi-agent Systems -- A Technical Report
Jul 22, 2022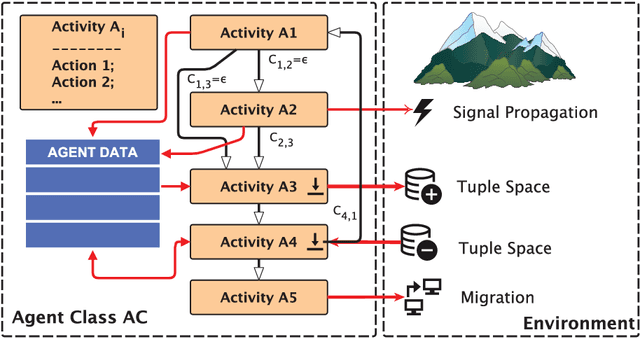
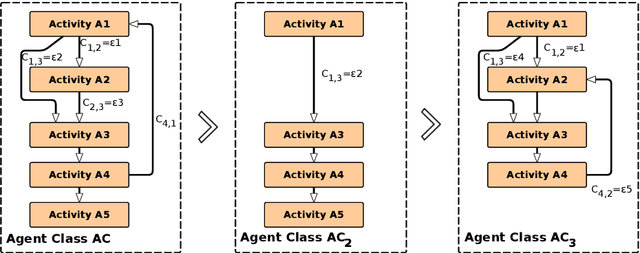
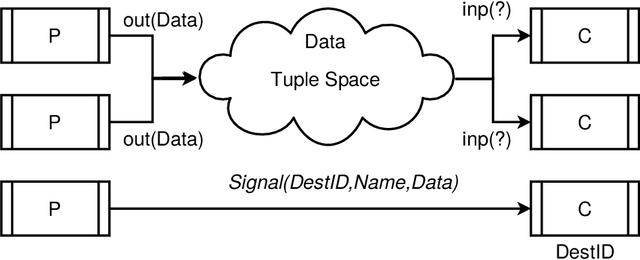
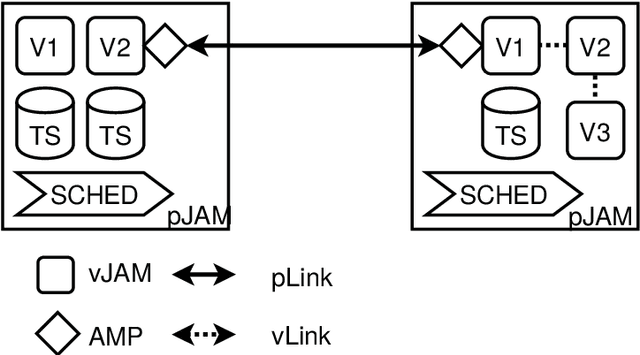
Agent-based modelling (ABM), simulation (ABS), and distributed computation (ABC) are established methods. The Internet and Web-based technologies are suitable carriers. This paper is a technical report with some tutorial aspects of the JavaScript Agent Machine (JAM) platform and the programming of agents with AgentJS, a sub-set of the widely used JavaScript programming language for the programming of mobile state-based reactive agents. In addition to explaining the motivation for particular design choices and introducing core concepts of the architecture and the programming of agents in JavaScript, short examples illustrate the power of the JAM platform and its components for the deployment of large-scale multi-agent system in strong heterogeneous environments like the Internet. JAM is suitable for the deployment in strong heterogeneous and mobile environments. Finally, JAM can be used for ABC as well as for ABS in an unified methodology, finally enabling mobile crowd sensing coupled with simulation (ABS).
BeeTS: Smart Distributed Sensor Tuple Spaces combined with Agents using Bluetooth and IP Broadcasting
Apr 05, 2022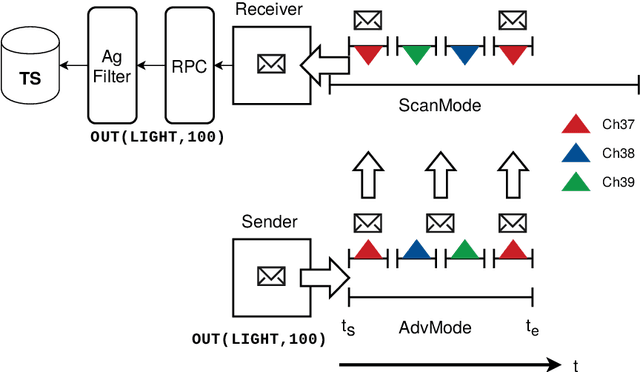
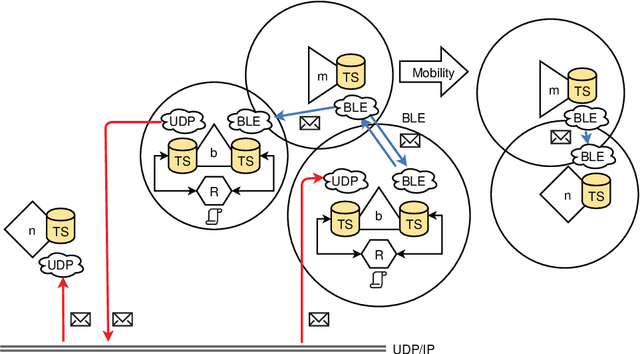
Most Internet-of-Things (IoT) devices and smart sensors are connected via the Internet using IP communication driectly accessed by a server that collect sensor information periodically or event-based. Although, Internet access is widely available, there are places that are not covered and WLAN and mobile cell communication requires a descent amount of power not always available. Finally, the spatial context (the environment in which the sensor or devices is situated) is not considered (or lost) by Internet connectivity. In this work, smart devices communicate connectionless and ad-hoc by using low-energy Bluetooth broadcasting available in any smartphone and in most embedded computers, e.g., the Raspberry PI devices. Bi-directional connectionless communication is established via the advertisements and scanning modes. The communication nodes can exchange data via functional tuples using a tuple space service on each node. Tuple space access is performed by simple evenat-based agents. Mobile devices act as tuple carriers that can carry tuples between different locations. Additionally, UDP-based Intranet communication can be used to access tuple spaces on a wider spatial range. The Bluetooth Low Energy Tuple Space (BeeTS) service enables opportunistic, ad-hoc and loosely coupled device communication with a spatial context.
Self-organising Urban Traffic control on micro-level using Reinforcement Learning and Agent-based Modelling
Feb 24, 2022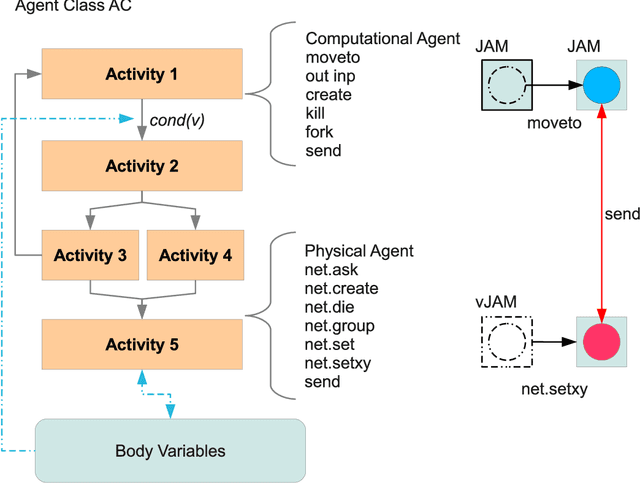
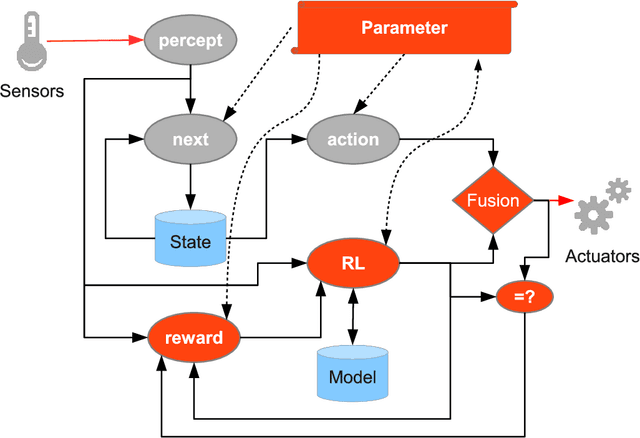
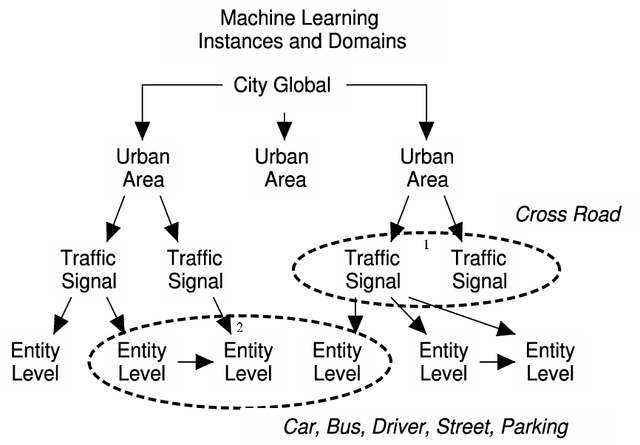
Most traffic flow control algorithms address switching cycle adaptation of traffic signals and lights. This work addresses traffic flow optimisation by self-organising micro-level control combining Reinforcement Learning and rule-based agents for action selection performing long-range navigation in urban environments. I.e., vehicles represented by agents adapt their decision making for re-routing based on local environmental sensors. Agent-based modelling and simulation is used to study emergence effects on urban city traffic flows. An unified agent programming model enables simulation and distributed data processing with possible incorporation of crowd sensing tasks used as an additional sensor data base. Results from an agent-based simulation of an artificial urban area show that the deployment of micro-level vehicle navigation control just by learned individual decision making and re-routing based on local environmental sensors can increase the efficiency of mobility in terms of path length and travelling time.