 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFunctionals in the Clouds: An abstract architecture of serverless Cloud-Native Apps
Jun 02, 2021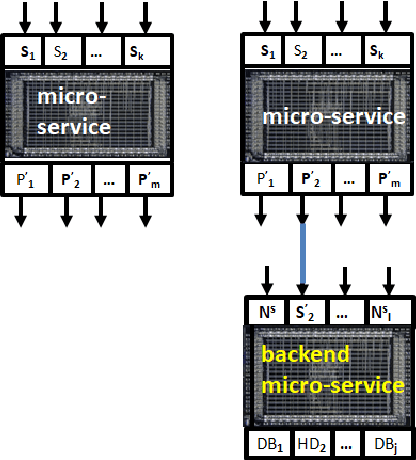
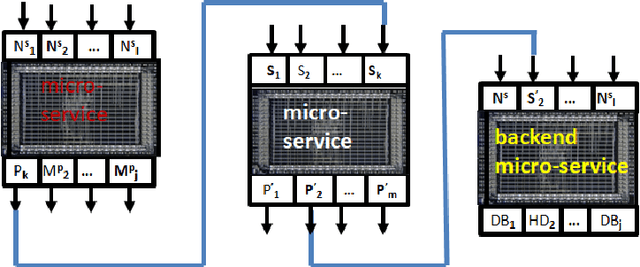
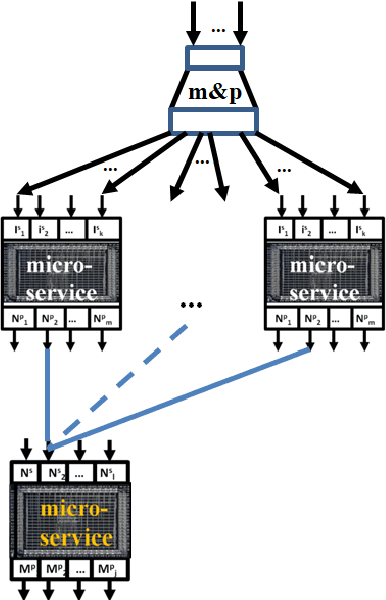
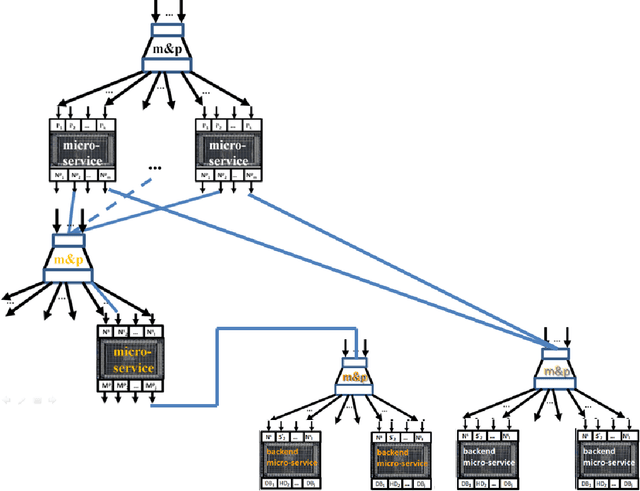
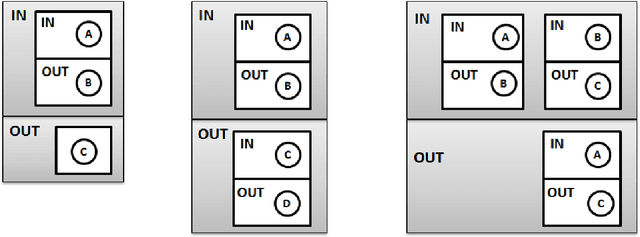
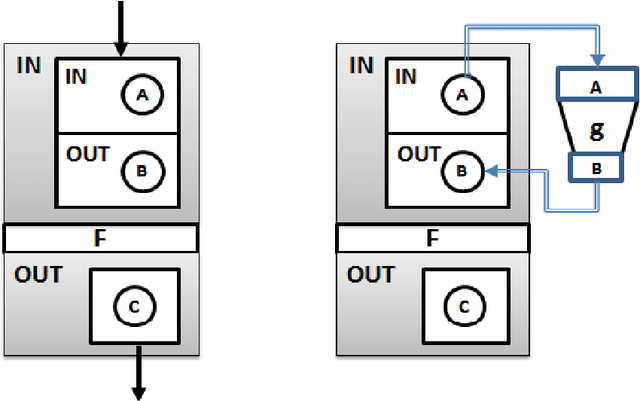
Cloud Native Application CNApp (as a distributed system) is a collection of independent components (micro-services) interacting via communication protocols. This gives rise to present an abstract architecture of CNApp as dynamically re-configurable acyclic directed multi graph where vertices are microservices, and edges are the protocols. Generic mechanisms for such reconfigurations evidently correspond to higher-level functions (functionals). This implies also internal abstract architecture of microservice as a collection of event-triggered serverless functions (including functions implementing the protocols) that are dynamically composed into event-dependent data-flow graphs. Again, generic mechanisms for such compositions correspond to calculus of functionals and relations.
A generic ontology and recovery protocols for Human-Robot Collaboration systems
Mar 20, 2020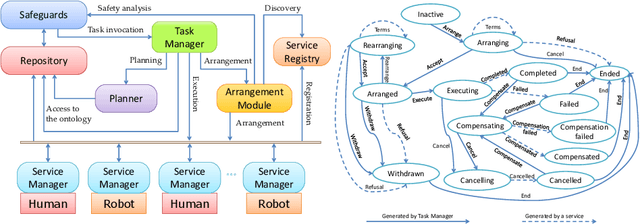
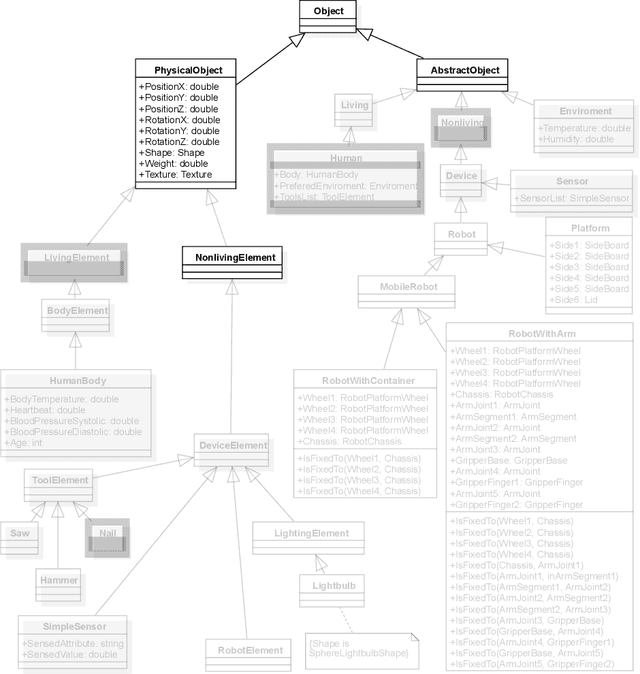
Humans are considered as integral components of Human-Robot Collaboration (HRC) systems, not only as object (e.g. in health care), but also as operators and service providers in manufacturing. Sophisticated and complex tasks are to be collaboratively executed by devices (robots) and humans. We introduce a generic ontology for HRC systems. Description of humans is a part of the ontology. Critical and hazardous (for humans) situations, as well as corresponding safeguards are defined on the basis of the ontology. The ontology is an extension of the ontology introduced in Skarzynski et al. (2018) arXiv:1709.03300. The architecture of SO-MRS (see arXiv:1709.03300), a software platform for automatic task accomplishment, is extended to HRC systems. Ongoing experiments, carried out in a simulated HRC system, are to verify the ontology and the architecture.
SO-MRS: a multi-robot system architecture based on the SOA paradigm and ontology
Sep 14, 2017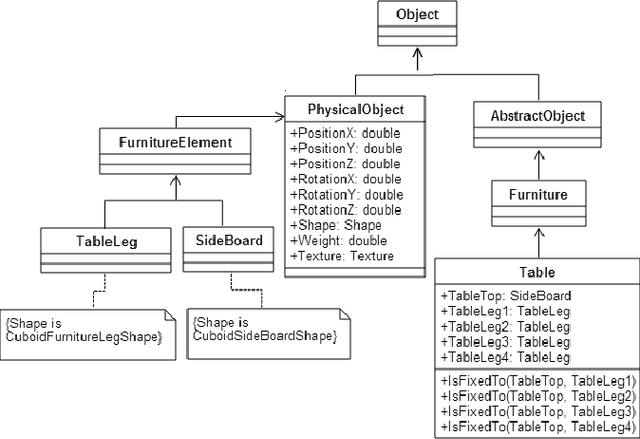
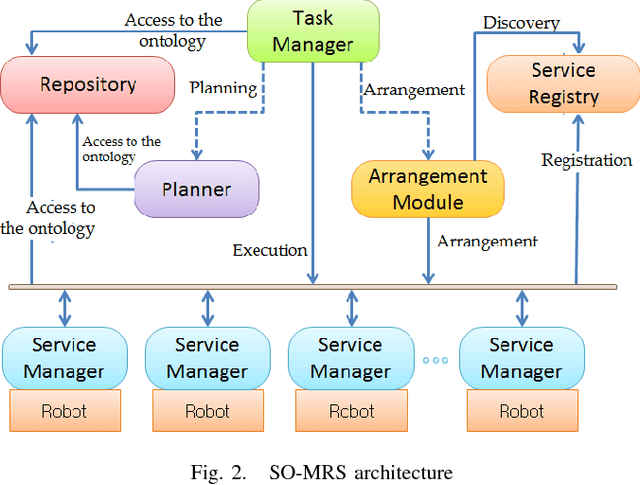
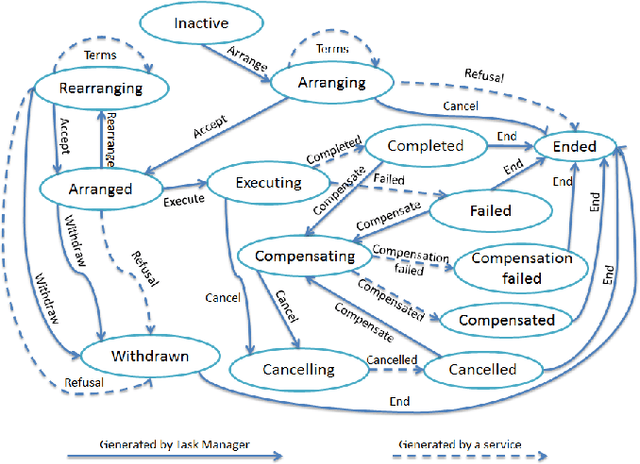
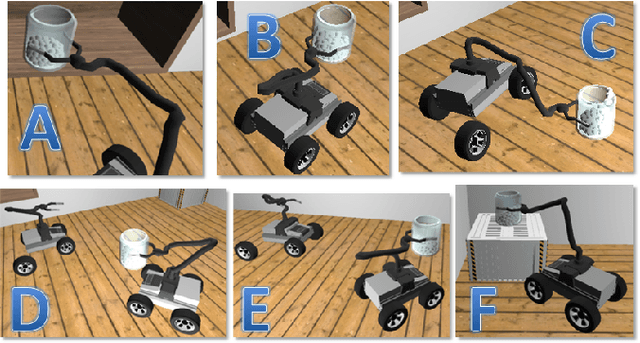
A generic architecture for a class of distributed robotic systems is presented. The architecture supports openness and heterogeneity, i.e. heterogeneous components may be joined and removed from the systems without affecting its basic functionality. The architecture is based on the paradigm of Service Oriented Architecture (SOA), and a generic representation (ontology) of the environment. A device (e.g. robot) is seen as a collection of its capabilities exposed as services. Generic protocols for publishing, discovering, arranging services are proposed for creating composite services that can accomplish complex tasks in an automatic way. Also generic protocols for execution of composite services are proposed along with simple protocols for monitoring the executions, and for recovery from failures. A software platform built on a multi-robot system (according to the proposed architecture) is a multi-agent system.
On higher order computations and synaptic meta-plasticity in the human brain: IT point of view (June, 2016)
Jun 16, 2016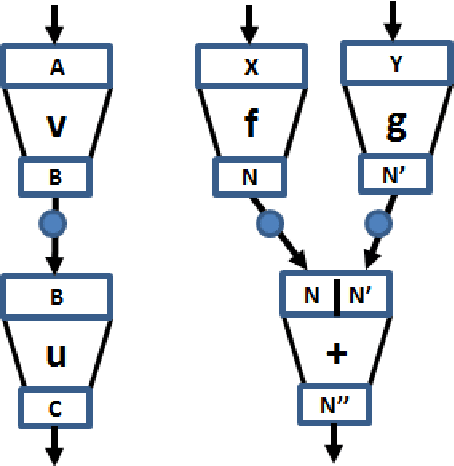
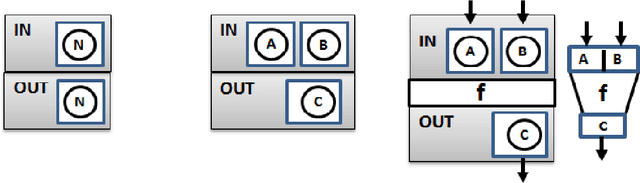
Glia modify neuronal connectivity by creating structural changes in the neuronal connectome. Glia also influence the functional connectome by modifying the flow of information through neural networks (Fields et al. 2015). There are strong experimental evidences that glia are responsible for synaptic meta-plasticity. Synaptic plasticity is the modification of the strength of connections between neurons. Meta-plasticity, i.e. plasticity of synaptic plasticity, may be viewed as mechanisms for dynamic reconfiguration of neuron circuits. First order computations in the brain are done by static neuron circuits, whereas higher order computations are done by dynamic reconfigurations of the links (synapses) between the neuron circuits. Static neuron circuits correspond to first order computable functions. Synapse creation correspond to the mathematical notion of function composition. Functionals are higher order functions that take functions as their arguments. The construction of functionals is based on dynamic reconfigurations of the function composition. Perhaps the functionals correspond to the meta-plasticity in the human brain.