 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSelf-Supervised Learning for Robotic Leaf Manipulation: A Hybrid Geometric-Neural Approach
May 06, 2025



Automating leaf manipulation in agricultural settings faces significant challenges, including the variability of plant morphologies and deformable leaves. We propose a novel hybrid geometric-neural approach for autonomous leaf grasping that combines traditional computer vision with neural networks through self-supervised learning. Our method integrates YOLOv8 for instance segmentation and RAFT-Stereo for 3D depth estimation to build rich leaf representations, which feed into both a geometric feature scoring pipeline and a neural refinement module (GraspPointCNN). The key innovation is our confidence-weighted fusion mechanism that dynamically balances the contribution of each approach based on prediction certainty. Our self-supervised framework uses the geometric pipeline as an expert teacher to automatically generate training data. Experiments demonstrate that our approach achieves an 88.0% success rate in controlled environments and 84.7% in real greenhouse conditions, significantly outperforming both purely geometric (75.3%) and neural (60.2%) methods. This work establishes a new paradigm for agricultural robotics where domain expertise is seamlessly integrated with machine learning capabilities, providing a foundation for fully automated crop monitoring systems.
T-REX: Vision-Based System for Autonomous Leaf Detection and Grasp Estimation
May 03, 2025
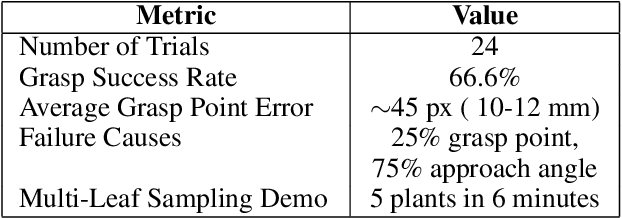
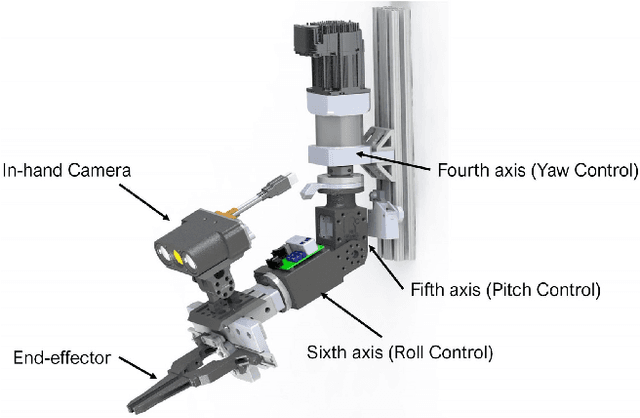

T-Rex (The Robot for Extracting Leaf Samples) is a gantry-based robotic system developed for autonomous leaf localization, selection, and grasping in greenhouse environments. The system integrates a 6-degree-of-freedom manipulator with a stereo vision pipeline to identify and interact with target leaves. YOLOv8 is used for real-time leaf segmentation, and RAFT-Stereo provides dense depth maps, allowing the reconstruction of 3D leaf masks. These observations are processed through a leaf grasping algorithm that selects the optimal leaf based on clutter, visibility, and distance, and determines a grasp point by analyzing local surface flatness, top-down approachability, and margin from edges. The selected grasp point guides a trajectory executed by ROS-based motion controllers, driving a custom microneedle-equipped end-effector to clamp the leaf and simulate tissue sampling. Experiments conducted with artificial plants under varied poses demonstrate that the T-Rex system can consistently detect, plan, and perform physical interactions with plant-like targets, achieving a grasp success rate of 66.6\%. This paper presents the system architecture, implementation, and testing of T-Rex as a step toward plant sampling automation in Controlled Environment Agriculture (CEA).