 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNatural Locomotion: Principle and Method
May 27, 2026Robotic locomotion can become efficient when mechanisms exploit passive dynamics, compliance, and resonance rather than track prescribed trajectories. This paper formulates natural locomotion as an exchange principle for systems whose motion is mediated by environmental constraints or interactions. A motion is natural when an internal oscillator returns periodically, the body pose drifts, and the mean Propulsion--Oscillator Exchange power (POE power) vanishes over one cycle. The selected family is a Natural Locomotion Manifold (NLM). We develop the conservative realization of this principle for continuous ideal environmental constraints: the constraints do no external work, total mechanical energy is conserved, and zero mean POE power is an internal exchange with the environment-mediated propulsive channel, not external energy input. The method is a closed/open construction. The propulsive channel is first closed to reveal an effective internal oscillator, organized by scalar action-angle structure in one effective degree of freedom or by nonlinear modal sectors in several degrees of freedom. The channel is then reopened, pose is reconstructed, and accepted cycles must preserve internal recurrence and zero mean POE power. We demonstrate the principle on two ideal nonholonomic no-slip systems: a Chaplygin-sleigh / pendulum-driven car and a three-body extension. In the scalar case, POE closure is equivalent to the missing internal return condition, giving a theorem-backed computation of the NLM family. In the multi-degree case, POE closure remains necessary but must be completed by modal identity, internal return, dynamics consistency, same fixed passive architecture, and nonzero displacement. Natural locomotion becomes a design question: which passive architectures support no, one, or several certified NLM families?
Proving the existence of loops in robot trajectories
Dec 04, 2017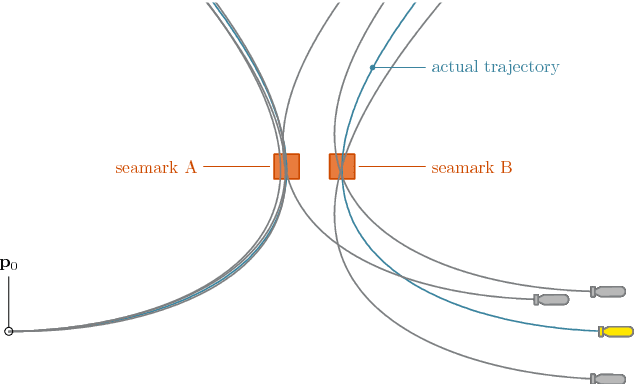
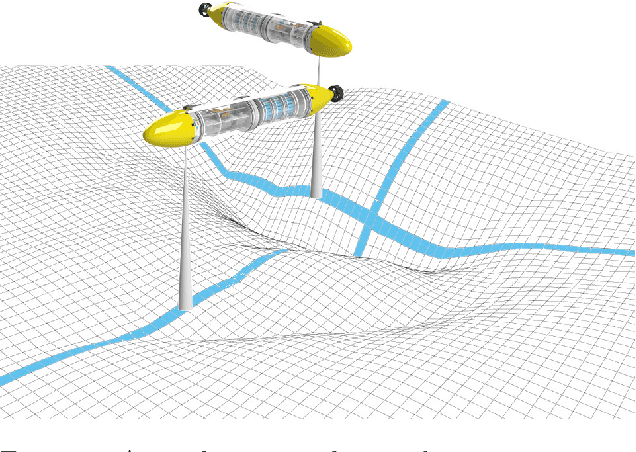
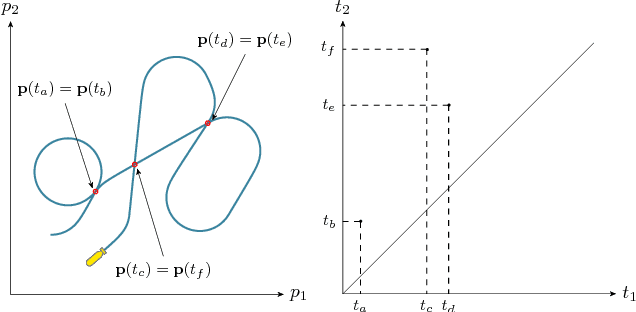
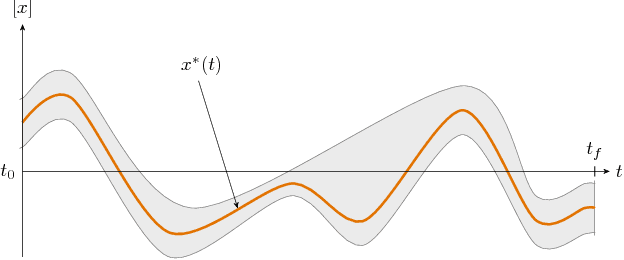
This paper presents a reliable method to verify the existence of loops along the uncertain trajectory of a robot, based on proprioceptive measurements only, within a bounded-error context. The loop closure detection is one of the key points in SLAM methods, especially in homogeneous environments with difficult scenes recognitions. The proposed approach is generic and could be coupled with conventional SLAM algorithms to reliably reduce their computing burden, thus improving the localization and mapping processes in the most challenging environments such as unexplored underwater extents. To prove that a robot performed a loop whatever the uncertainties in its evolution, we employ the notion of topological degree that originates in the field of differential topology. We show that a verification tool based on the topological degree is an optimal method for proving robot loops. This is demonstrated both on datasets from real missions involving autonomous underwater vehicles, and by a mathematical discussion.