 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGlobal Optimization of Stochastic Black-Box Functions with Arbitrary Noise Distributions using Wilson Score Kernel Density Estimation
Sep 11, 2025Many optimization problems in robotics involve the optimization of time-expensive black-box functions, such as those involving complex simulations or evaluation of real-world experiments. Furthermore, these functions are often stochastic as repeated experiments are subject to unmeasurable disturbances. Bayesian optimization can be used to optimize such methods in an efficient manner by deploying a probabilistic function estimator to estimate with a given confidence so that regions of the search space can be pruned away. Consequently, the success of the Bayesian optimization depends on the function estimator's ability to provide informative confidence bounds. Existing function estimators require many function evaluations to infer the underlying confidence or depend on modeling of the disturbances. In this paper, it is shown that the confidence bounds provided by the Wilson Score Kernel Density Estimator (WS-KDE) are applicable as excellent bounds to any stochastic function with an output confined to the closed interval [0;1] regardless of the distribution of the output. This finding opens up the use of WS-KDE for stable global optimization on a wider range of cost functions. The properties of WS-KDE in the context of Bayesian optimization are demonstrated in simulation and applied to the problem of automated trap design for vibrational part feeders.
A Flexible and Robust Vision Trap for Automated Part Feeder Design
Jun 01, 2022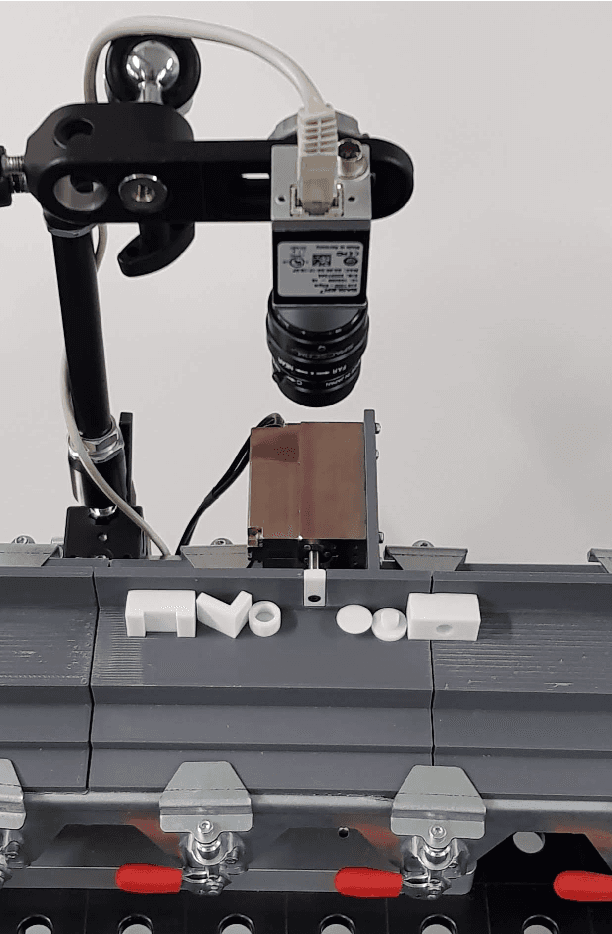
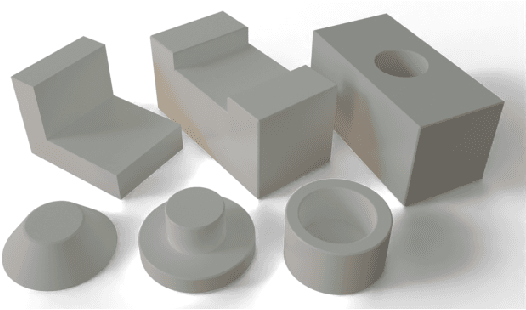
Fast, robust, and flexible part feeding is essential for enabling automation of low volume, high variance assembly tasks. An actuated vision-based solution on a traditional vibratory feeder, referred to here as a vision trap, should in principle be able to meet these demands for a wide range of parts. However, in practice, the flexibility of such a trap is limited as an expert is needed to both identify manageable tasks and to configure the vision system. We propose a novel approach to vision trap design in which the identification of manageable tasks is automatic and the configuration of these tasks can be delegated to an automated feeder design system. We show that the trap's capabilities can be formalized in such a way that it integrates seamlessly into the ecosystem of automated feeder design. Our results on six canonical parts show great promise for autonomous configuration of feeder systems.