 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrom 3D Perception to Safety Reasoning: A Graph-Based Framework for Real-Time Underground Mine Monitoring
Jun 02, 2026Underground coal mining requires personnel and heavy equipment to operate within shared, confined, and poorly illuminated spaces where hazards such as equipment proximity violations, structural instabilities, and occluded blind spots are difficult to anticipate. Conventional monitoring systems, including fixed cameras and rule-based proximity alerts, can detect predefined events but lack the 3D scene understanding and contextual memory needed to identify complex or evolving hazards. This paper presents a continuous monitoring framework that converts colourised 3D point clouds into structured and traceable safety reasoning outputs. The framework combines 3D semantic perception, uncertainty-based anomaly detection, rule-based hazard checks, on-device LLM reasoning, and GraphRAG -based memory analysis to identify immediate hazards and interpret longer-term safety patterns. Scene and temporal graphs serve as the explicit knowledge structure, linking perception outputs across reasoning stages. To overcome the scarcity of labeled underground data, real roadway scans, controlled object placement, and high-fidelity longwall simulation were combined to generate diverse hazard scenarios, while self-supervised pretraining improved segmentation from limited annotations. The perception model achieved 92.7% accuracy at 30 FPS with low memory usage. Across 115 hazard scenarios, rule-based checks achieved 57% coverage, increasing to 76% with contextual LLM reasoning and 93% with memory-based reasoning using historical records. Qualitative results show uncertainty-derived anomaly signals support the interpretation of out-of-distribution hazards beyond predefined classes. Overall, graph-based knowledge representation combined with 3D perception and layered safety reasoning provides a practical foundation for intelligent decision support in underground mine monitoring.
Towards Integrated Rock Support Visualisation in 3D Point Cloud of Underground Mines
May 20, 2026The effectiveness of rock support in underground mines depends on the interaction between installed rock bolts and the structural fabric of the surrounding rock mass. However, discontinuity characterisation and rock bolt identification are commonly treated as separate tasks, limiting their value for integrated support assessment. This study presents an automated framework for integrated rock support visualisation using 3D point clouds of underground mine excavations. The framework integrates structure mapping, rock bolt identification, discontinuity plane fitting, and bolt orientation estimation into a unified workflow optimised for accuracy and computational efficiency. The outputs are used to generate an integrated 3D visualisation of fitted discontinuity planes and bolt vectors, enabling direct assessment of their spatial intersections and geometric relationships. A complementary stereographic analysis of discontinuity poles and bolt orientations is also performed to evaluate overall bolting geometric effectiveness relative to the mapped structural fabric. Additionally, bolt-level quality metrics, including exposed protrusion length and deviation from the local roof normal, are visualised to support assessment of installation quality. The proposed framework is demonstrated on real underground metal mine scans, producing accurate structure mapping and rock bolt identification results in medium-scale point clouds. Overall, the study provides a practical step towards automated, integrated geotechnical assessment of rock support effectiveness without requiring manual measurements or additional in-situ data acquisition.
Development and Validation of an Integrated LiDAR-Camera System for Real-Time Monitoring of Underground Longwall Operations
May 04, 2026Real-time spatial monitoring in underground longwall operations is challenging due to methane-related safety risks, poor visibility, elevated thermal loads, spatial confinement, and bandwidth-limited communications. Currently available camera-based monitoring provides visual context but lacks direct depth information, while standalone underground LiDAR scanners are limited to monochromatic or periodic 3D mapping. This paper presents the design, integration, and experimental validation of a LiDAR-camera monitoring system built around a certified flameproof enclosure that prevents flame propagation into the surrounding atmosphere. The system combines a solid-state LiDAR, an industrial RGB camera, and an onboard processor within a compact hardware assembly, supporting LiDAR-camera fusion, low-light image enhancement, and real-time processing. Laboratory experiments evaluated LiDAR and camera performance through the protective polycarbonate dome and quantified optical and geometric distortions introduced by the enclosure. Thermal testing showed that iterative component placement, heat sinking, and passive conduction reduced peak surface temperature from 106 °C to 70 °C, with internal temperature stabilising at 57 °C. Furthermore, a representative longwall simulation was created to evaluate the complete sensing, fusion, and transmission workflow under controlled geometric and low-light conditions. In the final configuration, more than 97% of LiDAR points fell within the camera field of view, supporting reliable colourisation. Enclosure-aware calibration and correction maintained geometric accuracy, while processed colourised point clouds were transmitted at up to 10 Hz with sustained bandwidth below 25 Mb/s.
Automated Discontinuity Set Characterisation in Enclosed Rock Face Point Clouds Using Single-Shot Filtering and Cyclic Orientation Transformation
Feb 02, 2026Characterisation of structural discontinuity sets in exposed rock faces of underground mine cavities is essential for assessing rock-mass stability, excavation safety, and operational efficiency. UAV and other mobile laser-scanning techniques provide efficient means of collecting point clouds from rock faces. However, the development of a robust and efficient approach for automatic characterisation of discontinuity sets in real-world scenarios, like fully enclosed rock faces in cavities, remains an open research problem. In this study, a new approach is proposed for automatic discontinuity set characterisation that uses a single-shot filtering strategy, an innovative cyclic orientation transformation scheme and a hierarchical clustering technique. The single-shot filtering step isolates planar regions while robustly suppressing noise and high-curvature artefacts in one pass using a signal-processing technique. To address the limitations of Cartesian clustering on polar orientation data, a cyclic orientation transformation scheme is developed, enabling accurate representation of dip angle and dip direction in Cartesian space. The transformed orientations are then characterised into sets using a hierarchical clustering technique, which handles varying density distributions and identifies clusters without requiring user-defined set numbers. The accuracy of the method is validated on real-world mine stope and against ground truth obtained using manually handpicked discontinuity planes identified with the Virtual Compass tool, as well as widely used automated structure mapping techniques. The proposed approach outperforms the other techniques by exhibiting the lowest mean absolute error in estimating discontinuity set orientations in real-world stope data with errors of 1.95° and 2.20° in nominal dip angle and dip direction, respectively, and dispersion errors lying below 3°.
Comparative Evaluation of Traditional and Deep Learning-Based Segmentation Methods for Spoil Pile Delineation Using UAV Images
Feb 01, 2024The stability of mine dumps is contingent upon the precise arrangement of spoil piles, taking into account their geological and geotechnical attributes. Yet, on-site characterisation of individual piles poses a formidable challenge. The utilisation of image-based techniques for spoil pile characterisation, employing remotely acquired data through unmanned aerial systems, is a promising complementary solution. Image processing, such as object-based classification and feature extraction, are dependent upon effective segmentation. This study refines and juxtaposes various segmentation approaches, specifically colour-based and morphology-based techniques. The objective is to enhance and evaluate avenues for object-based analysis for spoil characterisation within the context of mining environments. Furthermore, a comparative analysis is conducted between conventional segmentation approaches and those rooted in deep learning methodologies. Among the diverse segmentation approaches evaluated, the morphology-based deep learning segmentation approach, Segment Anything Model (SAM), exhibited superior performance in comparison to other approaches. This outcome underscores the efficacy of incorporating advanced morphological and deep learning techniques for accurate and efficient spoil pile characterisation. The findings of this study contribute valuable insights to the optimisation of segmentation strategies, thereby advancing the application of image-based techniques for the characterisation of spoil piles in mining environments.
A review of laser scanning for geological and geotechnical applications in underground mining
Nov 21, 2022Laser scanning can provide timely assessments of mine sites despite adverse challenges in the operational environment. Although there are several published articles on laser scanning, there is a need to review them in the context of underground mining applications. To this end, a holistic review of laser scanning is presented including progress in 3D scanning systems, data capture/processing techniques and primary applications in underground mines. Laser scanning technology has advanced significantly in terms of mobility and mapping, but there are constraints in coherent and consistent data collection at certain mines due to feature deficiency, dynamics, and environmental influences such as dust and water. Studies suggest that laser scanning has matured over the years for change detection, clearance measurements and structure mapping applications. However, there is scope for improvements in lithology identification, surface parameter measurements, logistic tracking and autonomous navigation. Laser scanning has the potential to provide real-time solutions but the lack of infrastructure in underground mines for data transfer, geodetic networking and processing capacity remain limiting factors. Nevertheless, laser scanners are becoming an integral part of mine automation thanks to their affordability, accuracy and mobility, which should support their widespread usage in years to come.
Three dimensional unique identifier based automated georeferencing and coregistration of point clouds in underground environment
Feb 22, 2021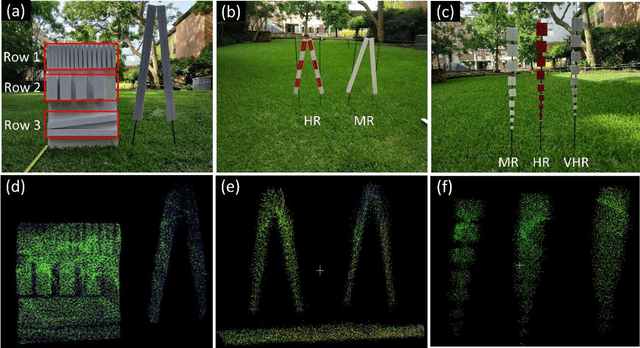


Spatially and geometrically accurate laser scans are essential in modelling infrastructure for applications in civil, mining and transportation. Monitoring of underground or indoor environments such as mines or tunnels is challenging due to unavailability of a sensor positioning framework, complicated structurally symmetric layouts, repetitive features and occlusions. Current practices largely include a manual selection of discernable reference points for georeferencing and coregistration purpose. This study aims at overcoming these practical challenges in underground or indoor laser scanning. The developed approach involves automatically and uniquely identifiable three dimensional unique identifiers (3DUIDs) in laser scans, and a 3D registration (3DReG) workflow. Field testing of the method in an underground tunnel has been found accurate, effective and efficient. Additionally, a method for automatically extracting roadway tunnel profile has been exhibited. The developed 3DUID can be used in roadway profile extraction, guided automation, sensor calibration, reference targets for routine survey and deformation monitoring.