Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModeling car-following behavior on urban expressways in Shanghai: A naturalistic driving study
Nov 11, 2018
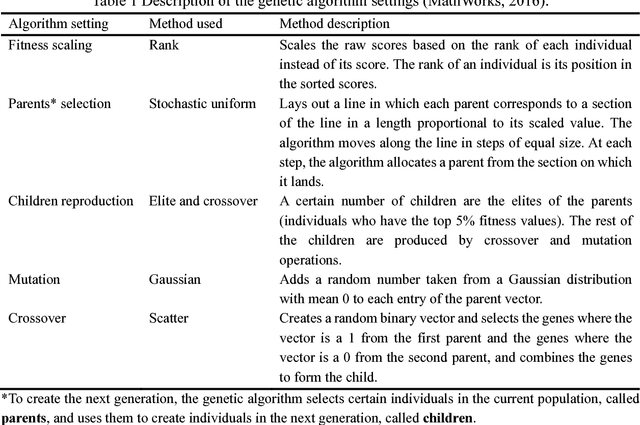
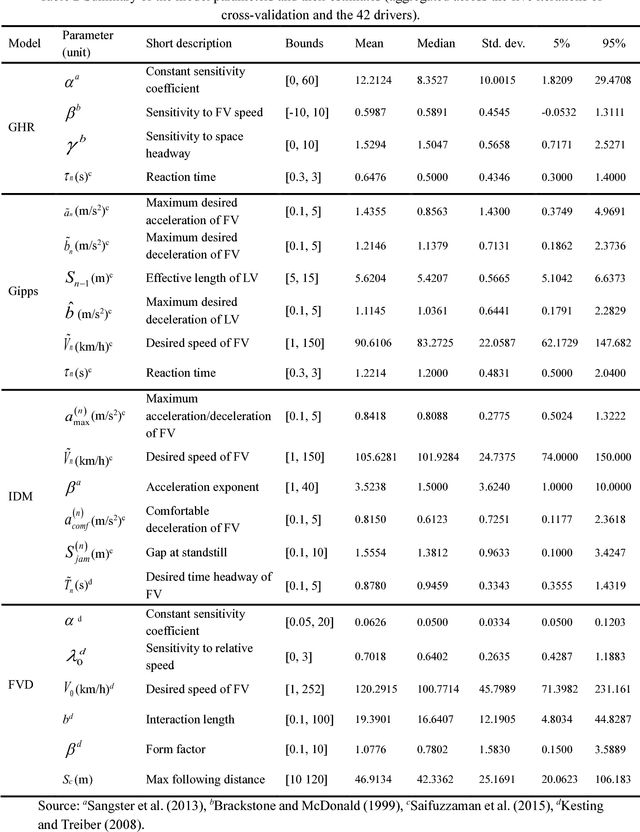
Five car-following models were calibrated, validated and cross-compared. The intelligent driver model performed best among the evaluated models. Considerable behavioral differences between different drivers were found. Calibrated model parameters may not be numerically equivalent with observed ones.
* Transportation Research Part C: Emerging Technologies Volume 93,
August 2018, Pages 425-445
Via