 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBuild a training interface to install the bat's echolocation skills in humans
Feb 17, 2023Bats use a sophisticated ultrasonic sensing method called echolocation to recognize the environment. Recently, it has been reported that sighted human participants with no prior experience in echolocation can improve their ability to perceive the spatial layout of various environments through training to listen to echoes (Norman, et al., 2021). In this study, we developed the new training system for human echolocation using the eye-tracker. Binaural echoes of consecutive downward linear FM pulses that were inspired by feeding strategies of echolocating bats were simulated using the wave equation finite difference time domain method. The virtual echoes were presented to the sighted subject in response to his or her eye movements on the monitor. The latency from eye gazing to the echo presentation wasn't audible delay to perceive. In a preliminary experiment in which the participants were asked to identify the shapes of the hidden target, the participants were found to concentrate their gaze on the edges of the hidden target on the monitor. We will conduct a psycho-acoustical experiment to examine the learning process of human echolocation in a shape-identification task, which will lead to device development in the field of welfare engineering.
Learning interaction rules from multi-animal trajectories via augmented behavioral models
Jul 14, 2021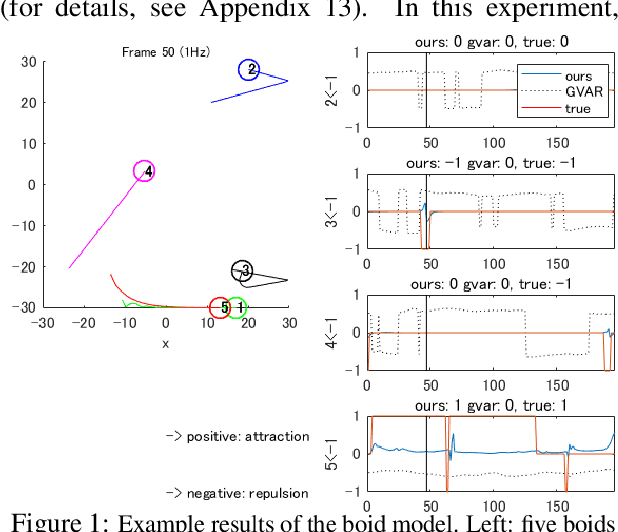
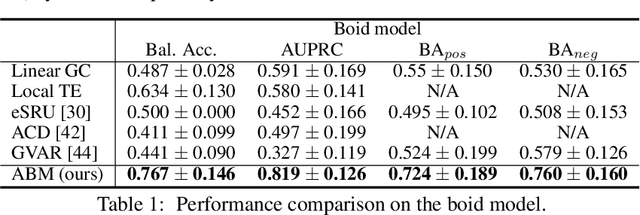
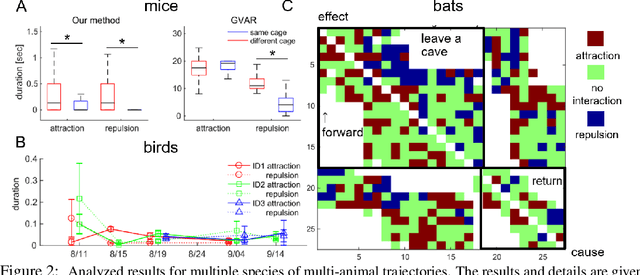
Extracting the interaction rules of biological agents from moving sequences pose challenges in various domains. Granger causality is a practical framework for analyzing the interactions from observed time-series data; however, this framework ignores the structures of the generative process in animal behaviors, which may lead to interpretational problems and sometimes erroneous assessments of causality. In this paper, we propose a new framework for learning Granger causality from multi-animal trajectories via augmented theory-based behavioral models with interpretable data-driven models. We adopt an approach for augmenting incomplete multi-agent behavioral models described by time-varying dynamical systems with neural networks. For efficient and interpretable learning, our model leverages theory-based architectures separating navigation and motion processes, and the theory-guided regularization for reliable behavioral modeling. This can provide interpretable signs of Granger-causal effects over time, i.e., when specific others cause the approach or separation. In experiments using synthetic datasets, our method achieved better performance than various baselines. We then analyzed multi-animal datasets of mice, flies, birds, and bats, which verified our method and obtained novel biological insights.