 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBidirectional Sampling Based Search Without Two Point Boundary Value Solution
Oct 28, 2020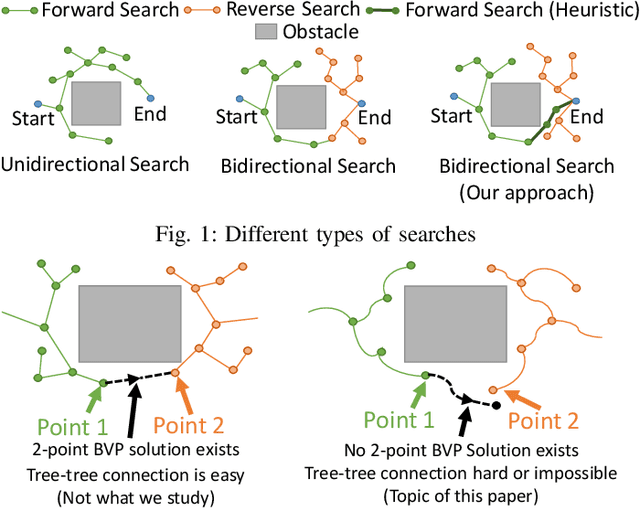
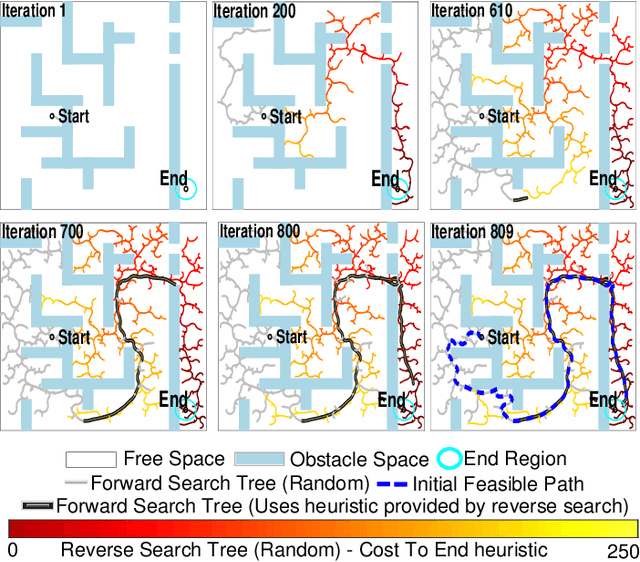
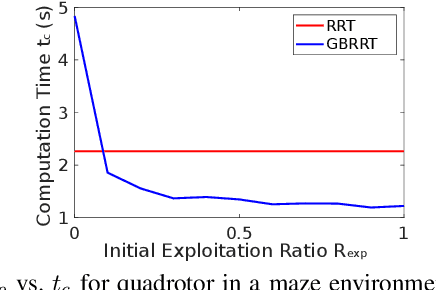
Bidirectional path and motion planning approaches decrease planning time, on average, compared to their unidirectional counterparts. In the context of single-query feasible motion planning, using bidirectional search to find a continuous motion plan requires an explicit connection between the forward search tree and the reverse search tree. Such a tree-tree connection requires solving a two-point Boundary Value Problem (BVP). However, two-point BVP solution can be difficult or impossible to calculate for many types of vehicles (using numerical methods to find a solution, such as shooting approaches may be computationally expensive and is sometimes numerically unstable). To overcome this challenge, we present a generalized bidirectional search algorithm that does not require solving two-point BVP. Instead of connecting the two trees directly, our algorithm uses the cost information of the reverse tree as a guiding heuristic for forward search. This enables the forward search to quickly converge to a full feasible solution without an explicit tree-tree connection and without the solution to a two-point BVP. We run multiple software simulations in different environments and using dynamics of different vehicles along with real-world hardware experiments to show that our approach performs very close or better than existing state of the art approaches in terms of quickly converging to an initial feasible solution.