 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInvestigations on the inference optimization techniques and their impact on multiple hardware platforms for Semantic Segmentation
Nov 29, 2019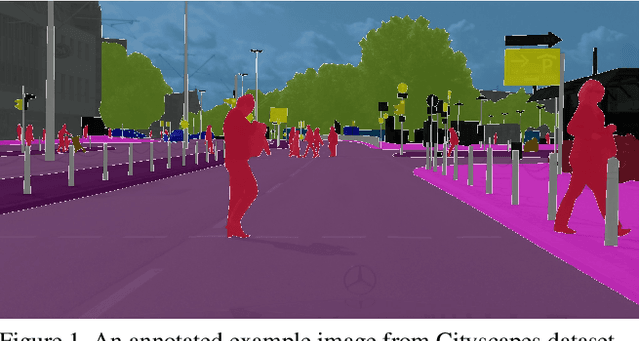
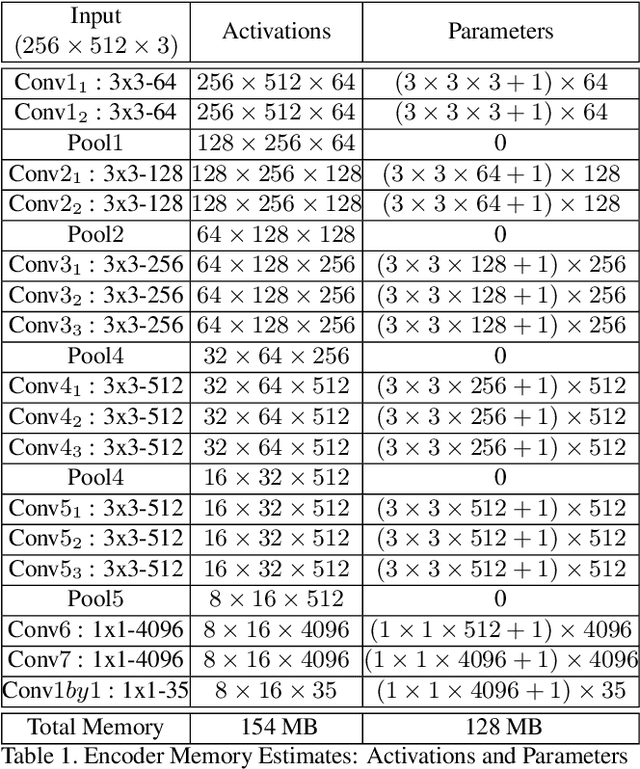
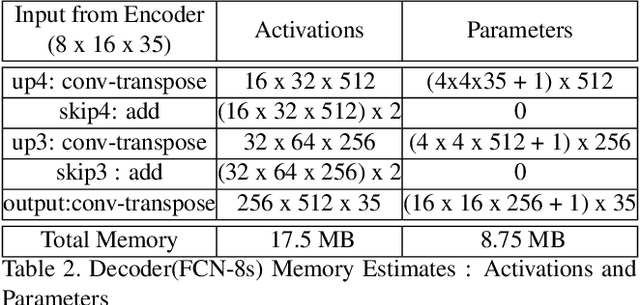
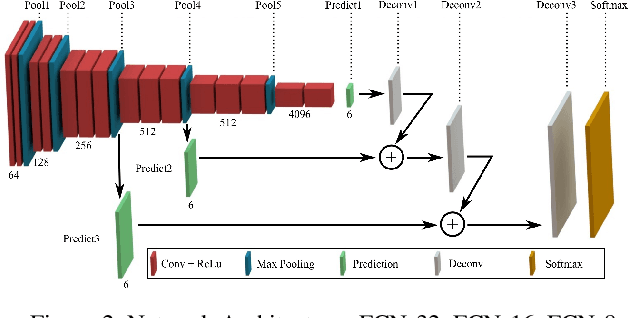
In this work, the task of pixel-wise semantic segmentation in the context of self-driving with a goal to reduce the inference time is explored. Fully Convolutional Network (FCN-8s, FCN-16s, and FCN-32s) with a VGG16 encoder architecture and skip connections is trained and validated on the Cityscapes dataset. Numerical investigations are carried out for several inference optimization techniques built into TensorFlow and TensorRT to quantify their impact on the inference time and network size. Finally, the trained network is ported on to an embedded platform (Nvidia Jetson TX1) and the inference time, as well as the total energy consumed for inference across hardware platforms, are compared.
A Neural Network Based Method to Solve Boundary Value Problems
Sep 24, 2019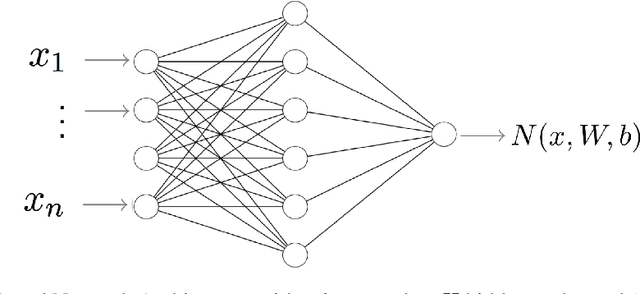
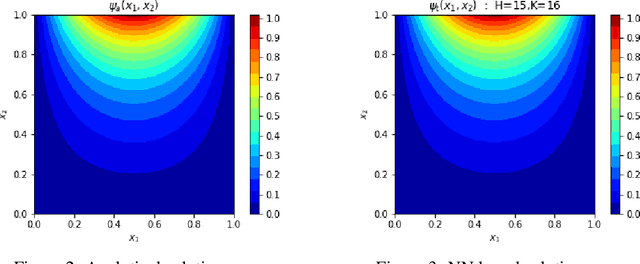
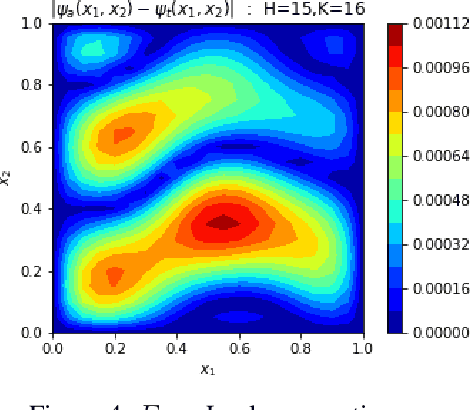
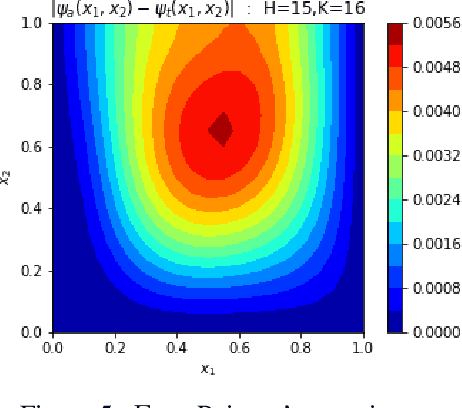
A Neural Network (NN) based numerical method is formulated and implemented for solving Boundary Value Problems (BVPs) and numerical results are presented to validate this method by solving Laplace equation with Dirichlet boundary condition and Poisson's equation with mixed boundary conditions. The principal advantage of NN based numerical method is the discrete data points where the field is computed, can be unstructured and do not suffer from issues of meshing like traditional numerical methods such as Finite Difference Time Domain or Finite Element Method. Numerical investigations are carried out for both uniform and non-uniform training grid distributions to understand the efficacy and limitations of this method and to provide qualitative understanding of various parameters involved.