 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Learning Based Speed Estimation for Constraining Strapdown Inertial Navigation on Smartphones
Aug 10, 2018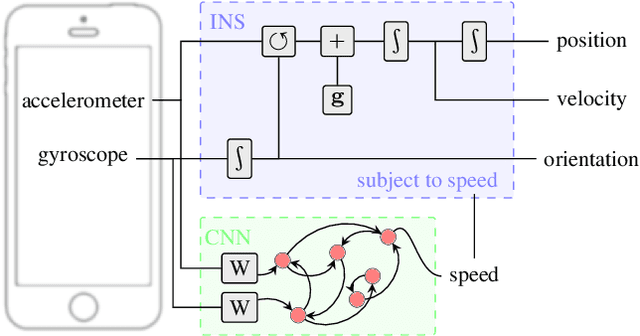
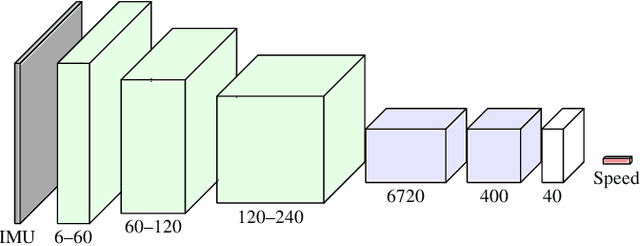
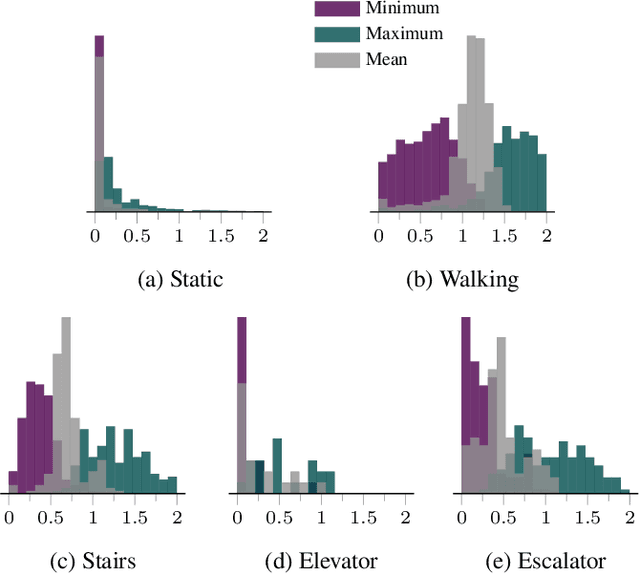
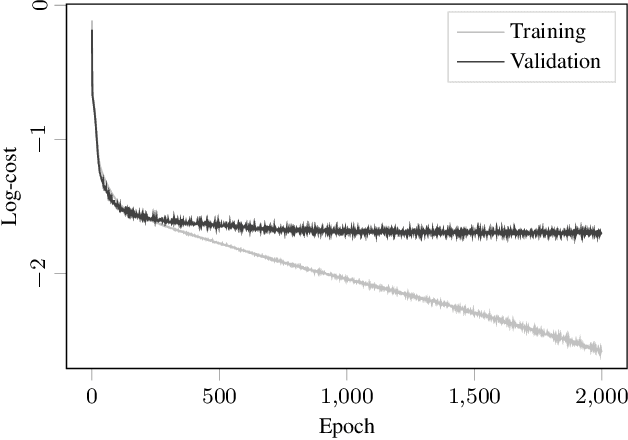
Strapdown inertial navigation systems are sensitive to the quality of the data provided by the accelerometer and gyroscope. Low-grade IMUs in handheld smart-devices pose a problem for inertial odometry on these devices. We propose a scheme for constraining the inertial odometry problem by complementing non-linear state estimation by a CNN-based deep-learning model for inferring the momentary speed based on a window of IMU samples. We show the feasibility of the model using a wide range of data from an iPhone, and present proof-of-concept results for how the model can be combined with an inertial navigation system for three-dimensional inertial navigation.
ADVIO: An authentic dataset for visual-inertial odometry
Jul 25, 2018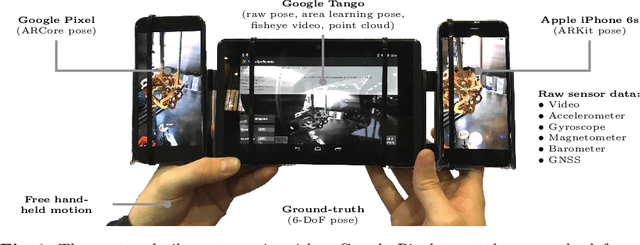
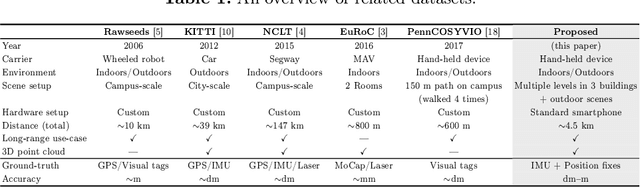
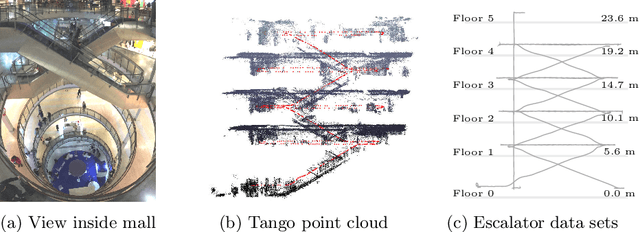
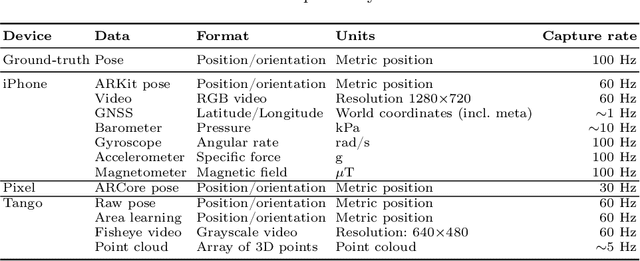
The lack of realistic and open benchmarking datasets for pedestrian visual-inertial odometry has made it hard to pinpoint differences in published methods. Existing datasets either lack a full six degree-of-freedom ground-truth or are limited to small spaces with optical tracking systems. We take advantage of advances in pure inertial navigation, and develop a set of versatile and challenging real-world computer vision benchmark sets for visual-inertial odometry. For this purpose, we have built a test rig equipped with an iPhone, a Google Pixel Android phone, and a Google Tango device. We provide a wide range of raw sensor data that is accessible on almost any modern-day smartphone together with a high-quality ground-truth track. We also compare resulting visual-inertial tracks from Google Tango, ARCore, and Apple ARKit with two recent methods published in academic forums. The data sets cover both indoor and outdoor cases, with stairs, escalators, elevators, office environments, a shopping mall, and metro station.