 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNEAT-NC: NEAT guided Navigation Cells for Robot Path Planning
Apr 16, 2026To navigate a space, the brain makes an internal representation of the environment using different cells such as place cells, grid cells, head direction cells, border cells, and speed cells. All these cells, along with sensory inputs, enable an organism to explore the space around it. Inspired by these biological principles, we developed NEATNC, a Neuro-Evolution of Augmenting Topology guided Navigation Cells. The goal of the paper is to improve NEAT algorithm performance in path planning in dynamic environments using spatial cognitive cells. This approach uses navigation cells as inputs and evolves recurrent neural networks, representing the hippocampus part of the brain. The performance of the proposed algorithm is evaluated in different static and dynamic scenarios. This study highlights NEAT's adaptability to complex and different environments, showcasing the utility of biological theories. This suggests that our approach is well-suited for real-time dynamic path planning for robotics and games.
* To appear in short form in Genetic and Evolutionary Computation Conference (GECCO '26), 2026
Integrated Strategy for Urban Traffic Optimization: Prediction, Adaptive Signal Control, and Distributed Communication via Messaging
Jan 02, 2025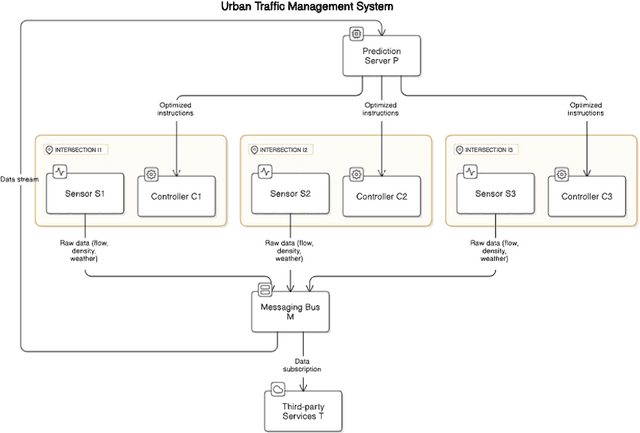
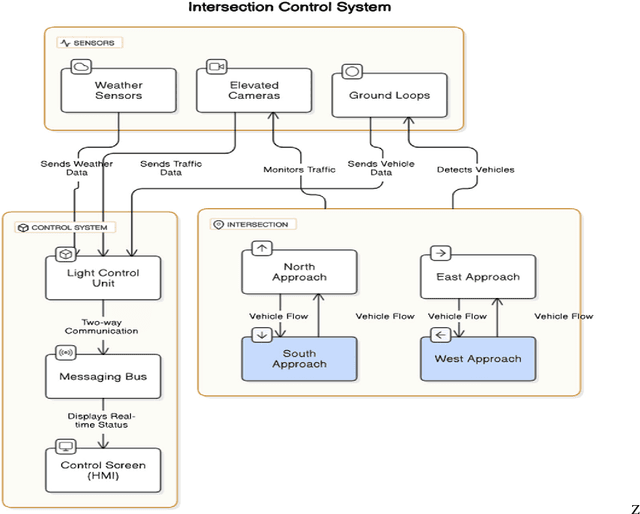
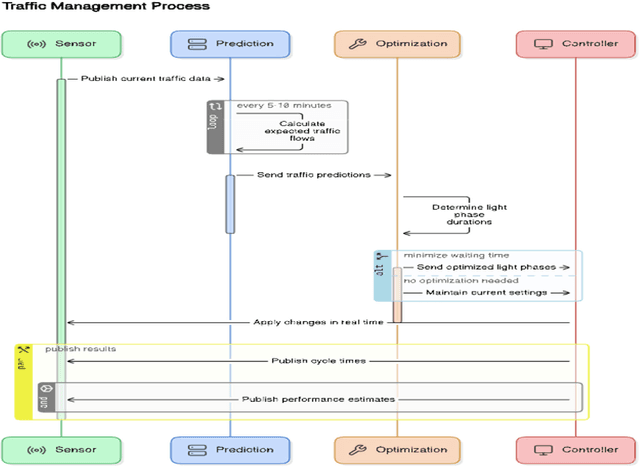
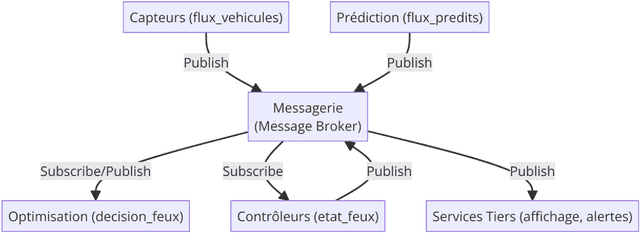
This work introduces an integrated approach to optimizing urban traffic by combining predictive modeling of vehicle flow, adaptive traffic signal control, and a modular integration architecture through distributed messaging. Using real-time data from various sensors, the system anticipates traffic fluctuations and dynamically adjusts signal phase durations to minimize delays and improve traffic flow. This proactive adjustment, supported by algorithms inspired by simulated annealing and reinforcement learning, also enhances energy efficiency, reduces pollutant emissions, and responds effectively to unexpected events (adverse weather, accidents, or temporary gatherings). Preliminary simulations conducted in a realistic urban environment demonstrate a significant reduction in average waiting times. Future developments include incorporating data from connected vehicles, integrating new modes of transport, and continuously refining predictive models to address the growing challenges of urban mobility.