 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA New Method for Features Normalization in Motor Imagery Few-Shot Learning using Resting-State
Mar 17, 2021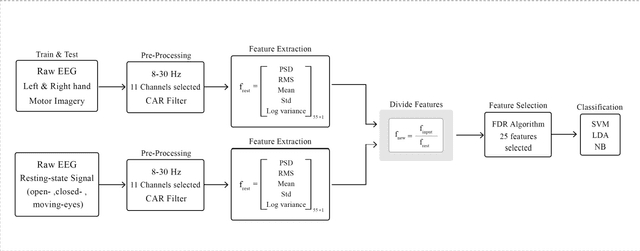
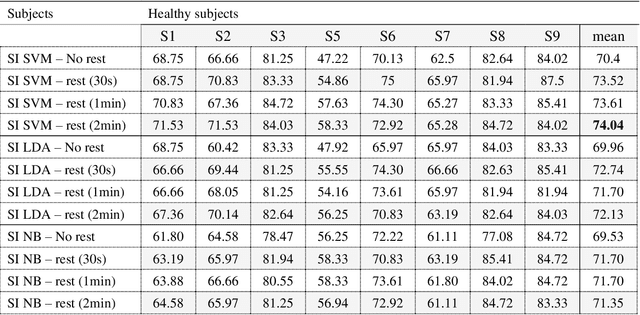
Brain-computer interface (BCI) systems are usually designed specifically for each subject based on motor imagery. Therefore, the usability of these networks has become a significant challenge. The network has to be designed separately for each user, which is time-consuming for the user. Therefore, this study proposes a method by which the calibration time is significantly reduced while the classification accuracy is increased. In this method, we calibrated the features extracted from the motor imagery task by dividing the features extracted from the resting-state into both open-eye and closed-eye modes and the state in which the subject moves his eyes. The best classification accuracy was obtained using the SVM classifier using the resting-state signal in the open eye, which increased by 3.64% to 74.04%. In this paper, we also investigated the effect of recording time of the resting-state signal and the impact of eye state on the classification accuracy.
Real-time gait planner for human walking using a lower limb exoskeleton and its implementation on Exoped robot
Jun 22, 2018
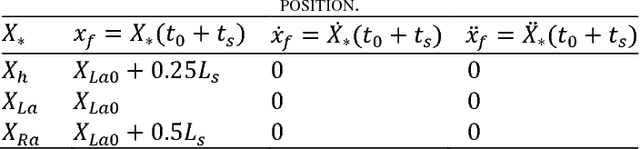

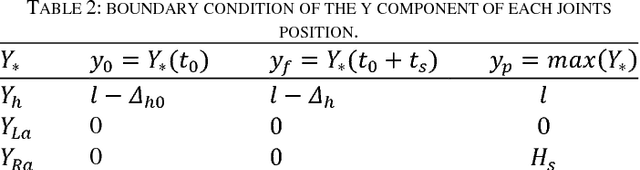
Lower extremity exoskeleton has been developed as a motion assistive technology in recent years. Walking pattern generation is a fundamental topic in the design of these robots. The usual approach with most exoskeletons is to use a pre-recorded pattern as a look-up table. There are some deficiencies with this method, including data storage limitation and poor regulation relating to the walking parameters. Therefore modeling human walking patterns to use in exoskeletons is required. The few existing models provide piece by piece walking patterns, only generating at the beginning of each stride cycle in respect to fixed walking parameters. In this paper, we present a real-time walking pattern generation method which enables changing the walking parameters during the stride. For this purpose, two feedback controlled third order systems are proposed as optimal trajectory planners for generating the trajectory of the x and y components of each joints position. The boundary conditions of the trajectories are obtained according to some pre-considered walking constraints. In addition, a cost function is intended for each trajectory planner in order to increase the trajectories smoothness. We use the minimum principle of Pontryagin to design the feedback controller in order to track the boundary conditions in such a way that the cost functions are minimized. Finally, by using inverse kinematics equations, the proper joints angles are generated for and implemented on Exoped robot. The good performance of the gait planner is demonstrated by second derivative continuity of the trajectories being maintained as a result of a simulation, and user satisfaction being determined by experimental testing.