 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMorphing of and writing with a scissor linkage mechanism
Feb 16, 2026Kinematics of mechanisms is intricately coupled to their geometry and their utility often arises out of the ability to perform reproducible motion with fewer actuating degrees of freedom. In this article, we explore the assembly of scissor-units, each made of two rigid linear members connected by a pin joint. The assembly has a single degree of freedom, where actuating any single unit results in a shape change of the entire assembly. We derive expressions for the effective curvature of the unit and the trajectory of the mechanism's tip as a function of the geometric variables which we then use as the basis to program two tasks in the mechanism: shape morphing and writing. By phrasing these tasks as optimization problems and utilizing the differentiable simulation framework, we arrive at solutions that are then tested in table-top experiments. Our results show that the geometry of scissor assemblies can be leveraged for automated navigation and inspection in complex domains, in light of the optimization framework. However, we highlight that the challenges associated with rapid programming and error-free implementation in experiments without feedback still remain.
Collective phototactic robotectonics
Aug 25, 2022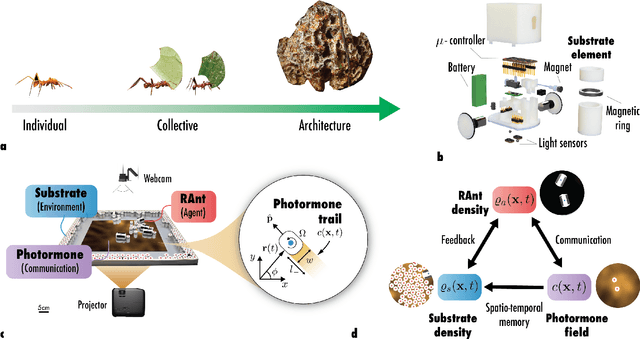
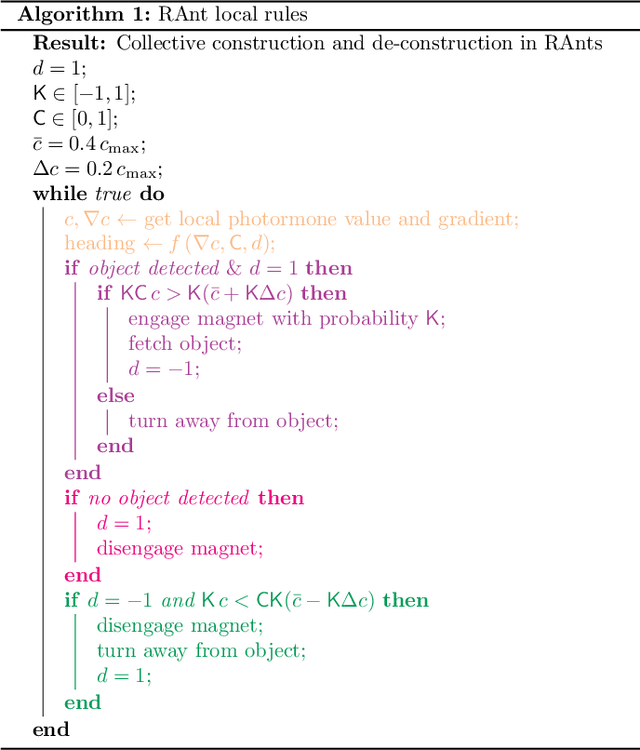
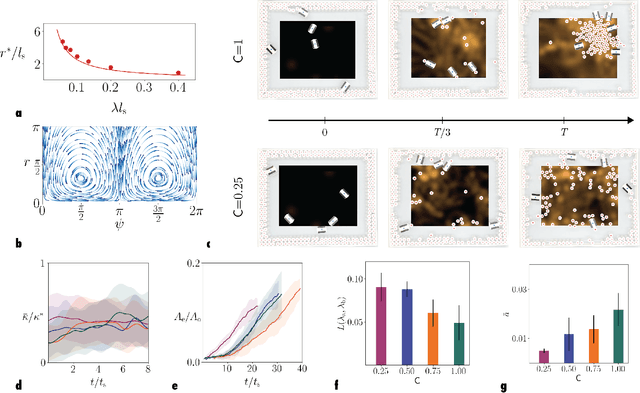
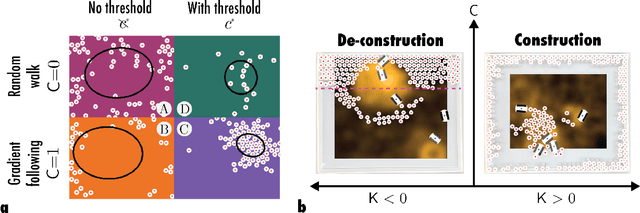
Cooperative task execution, a hallmark of eusociality, is enabled by local interactions between the agents and the environment through a dynamically evolving communication signal. Inspired by the collective behavior of social insects whose dynamics is modulated by interactions with the environment, we show that a robot collective can successfully nucleate a construction site via a trapping instability and cooperatively build organized structures. The same robot collective can also perform de-construction with a simple change in the behavioral parameter. These behaviors belong to a two-dimensional phase space of cooperative behaviors defined by agent-agent interaction (cooperation) along one axis and the agent-environment interaction (collection and deposition) on the other. Our behavior-based approach to robot design combined with a principled derivation of local rules enables the collective to solve tasks with robustness to a dynamically changing environment and a wealth of complex behaviors.