 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHumanity's Last Exam
Jan 24, 2025Benchmarks are important tools for tracking the rapid advancements in large language model (LLM) capabilities. However, benchmarks are not keeping pace in difficulty: LLMs now achieve over 90\% accuracy on popular benchmarks like MMLU, limiting informed measurement of state-of-the-art LLM capabilities. In response, we introduce Humanity's Last Exam (HLE), a multi-modal benchmark at the frontier of human knowledge, designed to be the final closed-ended academic benchmark of its kind with broad subject coverage. HLE consists of 3,000 questions across dozens of subjects, including mathematics, humanities, and the natural sciences. HLE is developed globally by subject-matter experts and consists of multiple-choice and short-answer questions suitable for automated grading. Each question has a known solution that is unambiguous and easily verifiable, but cannot be quickly answered via internet retrieval. State-of-the-art LLMs demonstrate low accuracy and calibration on HLE, highlighting a significant gap between current LLM capabilities and the expert human frontier on closed-ended academic questions. To inform research and policymaking upon a clear understanding of model capabilities, we publicly release HLE at https://lastexam.ai.
Analysis of Modern Computer Vision Models for Blood Cell Classification
Jun 30, 2024The accurate classification of white blood cells and related blood components is crucial for medical diagnoses. While traditional manual examinations and automated hematology analyzers have been widely used, they are often slow and prone to errors. Recent advancements in deep learning have shown promise for addressing these limitations. Earlier studies have demonstrated the viability of convolutional neural networks such as DenseNet, ResNet, and VGGNet for this task. Building on these foundations, our work employs more recent and efficient models to achieve rapid and accurate results. Specifically, this study used state-of-the-art architectures, including MaxVit, EfficientVit, EfficientNet, EfficientNetV2, and MobileNetV3. This study aimed to evaluate the performance of these models in WBC classification, potentially offering a more efficient and reliable alternative to current methods. Our approach not only addresses the speed and accuracy concerns of traditional techniques but also explores the applicability of innovative deep learning models in hematological analysis.
Development of a conversing and body temperature scanning autonomously navigating robot to help screen for COVID-19
Jun 18, 2021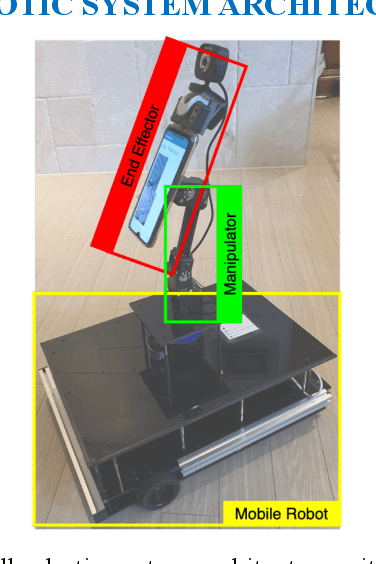
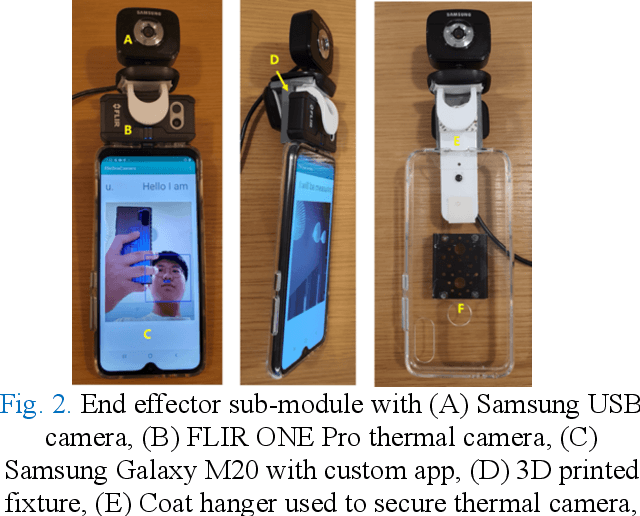
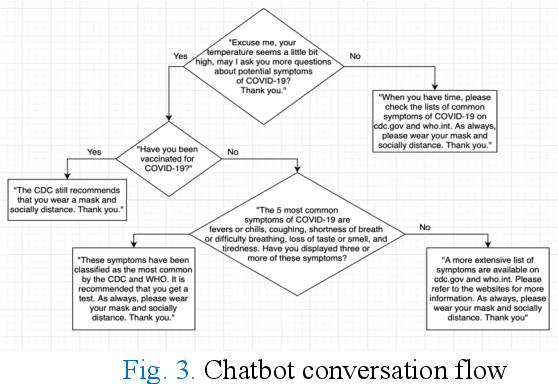
Throughout the COVID-19 pandemic, the most common symptom displayed by patients has been a fever, leading to the use of temperature scanning as a preemptive measure to detect potential carriers of the virus. Human employees with handheld thermometers have been used to fulfill this task, however this puts them at risk as they cannot be physically distanced and the sequential nature of this method leads to great inconveniences and inefficiency. The proposed solution is an autonomously navigating robot capable of conversing and scanning people's temperature to detect fevers and help screen for COVID-19. To satisfy this objective, the robot must be able to (1) navigate autonomously, (2) detect and track people, and (3) get individuals' temperature reading and converse with them if it exceeds 38{\deg}C. An autonomously navigating mobile robot is used with a manipulator controlled using a face tracking algorithm, and an end effector consisting of a thermal camera, smartphone, and chatbot. The goal is to develop a functioning solution that performs the above tasks. In addition, technical challenges encountered and their engineering solutions will be presented, and recommendations will be made for enhancements that could be incorporated when approaching commercialization.
Automatic calibration of time of flight based non-line-of-sight reconstruction
May 21, 2021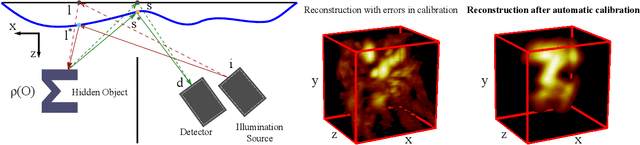
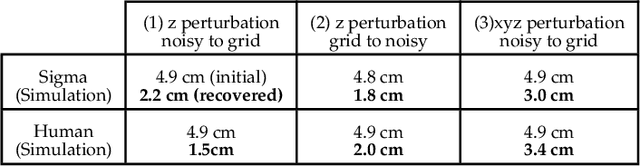
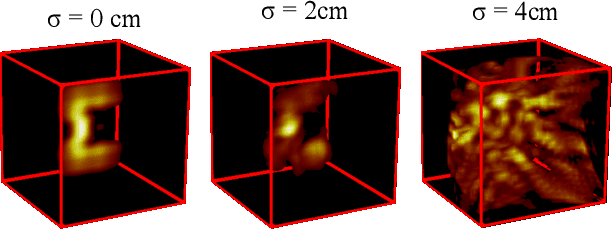

Time of flight based Non-line-of-sight (NLOS) imaging approaches require precise calibration of illumination and detector positions on the visible scene to produce reasonable results. If this calibration error is sufficiently high, reconstruction can fail entirely without any indication to the user. In this work, we highlight the necessity of building autocalibration into NLOS reconstruction in order to handle mis-calibration. We propose a forward model of NLOS measurements that is differentiable with respect to both, the hidden scene albedo, and virtual illumination and detector positions. With only a mean squared error loss and no regularization, our model enables joint reconstruction and recovery of calibration parameters by minimizing the measurement residual using gradient descent. We demonstrate our method is able to produce robust reconstructions using simulated and real data where the calibration error applied causes other state of the art algorithms to fail.