 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeData-driven modelling of autonomous and forced dynamical systems
Dec 13, 2025



The paper demonstrates that invariant foliations are accurate, data-efficient and practical tools for data-driven modelling of physical systems. Invariant foliations can be fitted to data that either fill the phase space or cluster about an invariant manifold. Invariant foliations can be fitted to a single trajectory or multiple trajectories. Over and underfitting are eliminated by appropriately choosing a function representation and its hyperparameters, such as polynomial orders. The paper extends invariant foliations to forced and parameter dependent systems. It is assumed that forcing is provided by a volume preserving map, and therefore the forcing can be periodic, quasi-periodic or even chaotic. The method utilises full trajectories, hence it is able to predict long-term dynamics accurately. We take into account if a forced system is reducible to an autonomous system about a steady state, similar to how Floquet theory guarantees reducibility for periodically forced systems. In order to find an invariant manifold, multiple invariant foliations are calculated in the neighbourhood of the invariant manifold. Some of the invariant foliations can be linear, while others nonlinear but only defined in a small neighbourhood of an invariant manifold, which reduces the number of parameters to be identified. An invariant manifold is recovered as the zero level set of one or more of the foliations. To interpret the results, the identified mathematical models are transformed to a canonical form and instantaneous frequency and damping information are calculated.
Machine-learning invariant foliations in forced systems for reduced order modelling
Mar 21, 2024We identify reduced order models (ROM) of forced systems from data using invariant foliations. The forcing can be external, parametric, periodic or quasi-periodic. The process has four steps: 1. identify an approximate invariant torus and the linear dynamics about the torus; 2. identify a globally defined invariant foliation about the torus; 3. identify a local foliation about an invariant manifold that complements the global foliation 4. extract the invariant manifold as the leaf going through the torus and interpret the result. We combine steps 2 and 3, so that we can track the location of the invariant torus and scale the invariance equations appropriately. We highlight some fundamental limitations of invariant manifolds and foliations when fitting them to data, that require further mathematics to resolve.
Data-driven reduced order models using invariant foliations, manifolds and autoencoders
Jun 24, 2022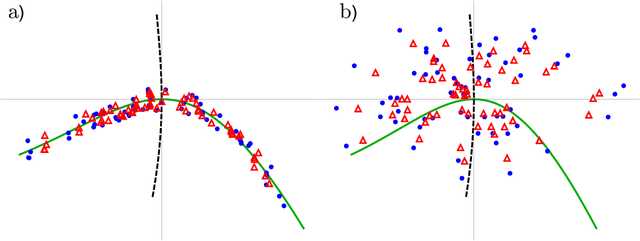
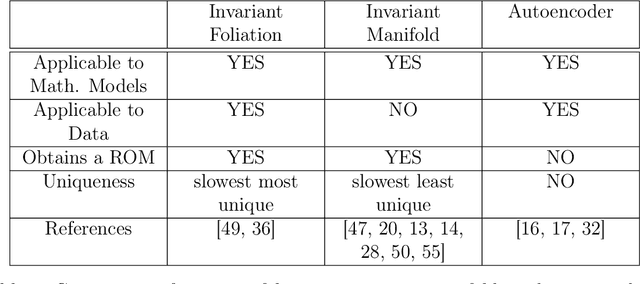
This paper explores the question: how to identify a reduced order model from data. There are three ways to relate data to a model: invariant foliations, invariant manifolds and autoencoders. Invariant manifolds cannot be fitted to data unless a hardware in a loop system is used. Autoencoders only identify the portion of the phase space where the data is, which is not necessarily an invariant manifold. Therefore for off-line data the only option is an invariant foliation. We note that Koopman eigenfunctions also define invariant foliations, but they are limited by the assumption of linearity and resulting singularites. Finding an invariant foliation requires approximating high-dimensional functions. We propose two solutions. If an accurate reduced order model is sought, a sparse polynomial approximation is used, with polynomial coefficients that are sparse hierarchical tensors. If an invariant manifold is sought, as a leaf of a foliation, the required high-dimensional function can be approximated by a low-dimensional polynomial. The two methods can be combined to find an accurate reduced order model and an invariant manifold. We also analyse the reduced order model in case of a focus type equilibrium, typical in mechanical systems. We note that the nonlinear coordinate system defined by the invariant foliation and the invariant manifold distorts instantaneous frequencies and damping ratios, which we correct. Through examples we illustrate the calculation of invariant foliations and manifolds, and at the same time show that Koopman eigenfunctions and autoencoders fail to capture accurate reduced order models under the same conditions.