 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSimulating Coverage Path Planning with Roomba
Oct 10, 2022
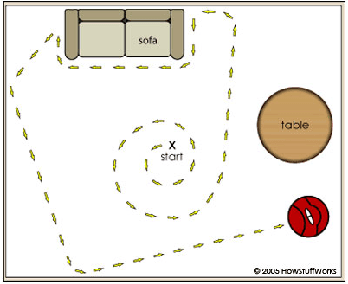


Coverage Path Planning involves visiting every unoccupied state in an environment with obstacles. In this paper, we explore this problem in environments which are initially unknown to the agent, for purposes of simulating the task of a vacuum cleaning robot. A survey of prior work reveals sparse effort in applying learning to solve this problem. In this paper, we explore modeling a Cover Path Planning problem using Deep Reinforcement Learning, and compare it with the performance of the built-in algorithm of the Roomba, a popular vacuum cleaning robot.
Training an Assassin AI for The Resistance: Avalon
Sep 19, 2022



The Resistance: Avalon is a partially observable social deduction game. This area of AI game playing is fairly undeveloped. Implementing an AI for this game involves multiple components specific to each phase as well as role in the game. In this paper, we plan to iteratively develop the required components for each role/phase by first addressing the Assassination phase which can be modeled as a machine learning problem. Using a publicly available dataset from an online version of the game, we train classifiers that emulate an Assassin. After trying various classification techniques, we are able to achieve above average human performance using a simple linear support vector classifier. The eventual goal of this project is to pursue developing an intelligent and complete Avalon player that can play through each phase of the game as any role.