 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIncreased Complexity of a Human-Robot Collaborative Task May Increase the Need for a Socially Competent Robot
Jul 11, 2022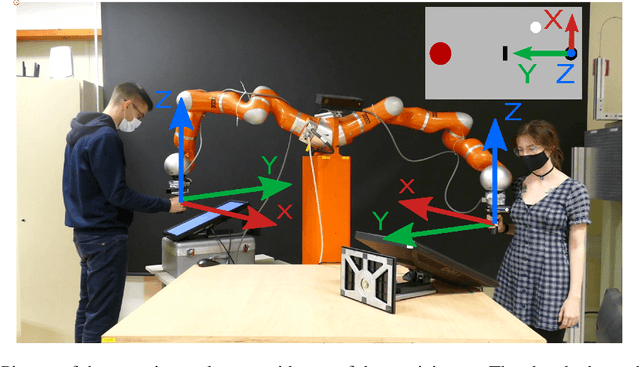

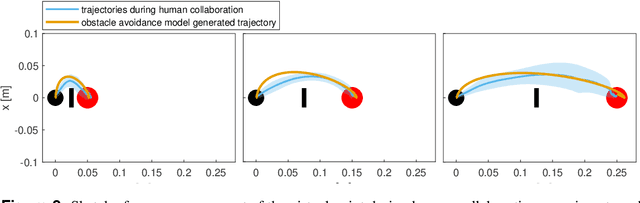
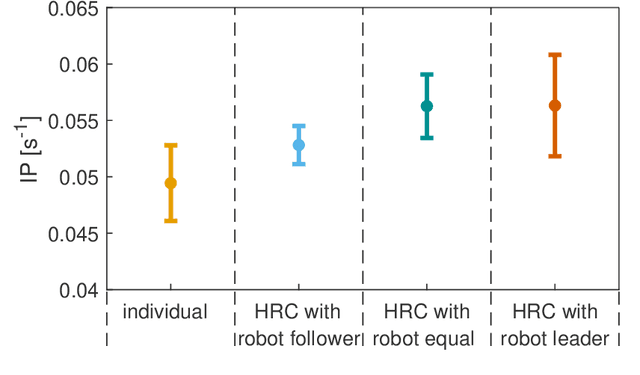
An important factor in developing control models for human-robot collaboration is how acceptable they are to their human partners. One such method for creating acceptable control models is to attempt to mimic human-like behaviour in robots so that their actions appear more intuitive to humans. To investigate how task complexity affects human perception and acceptance of their robot partner, we propose a novel human-based robot control model for obstacle avoidance that can account for the leader-follower dynamics that normally occur in human collaboration. The performance and acceptance of the proposed control method were evaluated using an obstacle avoidance scenario in which we compared task performance between individual tasks and collaborative tasks with different leader-follower dynamics roles for the robotic partner. The evaluation results showed that the robot control method is able to replicate human behaviour to improve the overall task performance of the subject in collaboration. However, regarding the acceptance of the robotic partner, the participants' opinions were mixed. Compared to the results of a study with a similar control method developed for a less complex task, the new results show a lower acceptance of the proposed control model, even though the control method was adapted to the more complex task from a dynamic standpoint. This suggests that the complexity of the collaborative task at hand increases the need not only for a more complex control model but also a more socially competent control model.
Leader-Follower Dynamics in Complex Obstacle Avoidance Task
Jul 11, 2022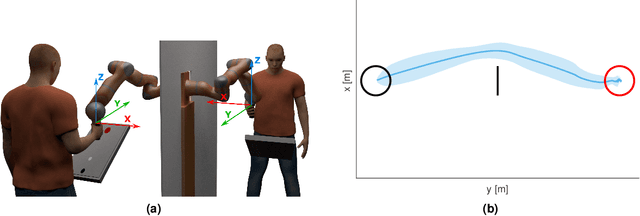
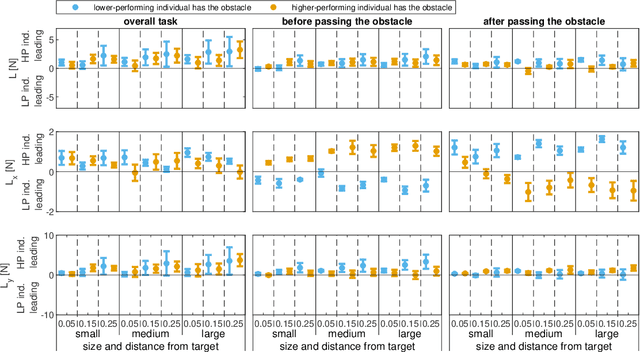
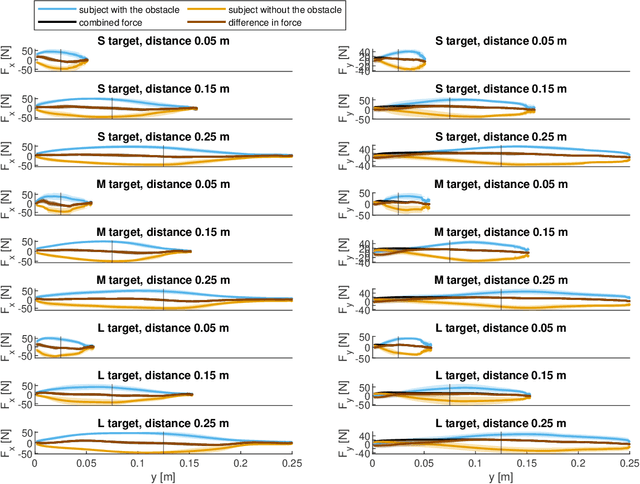
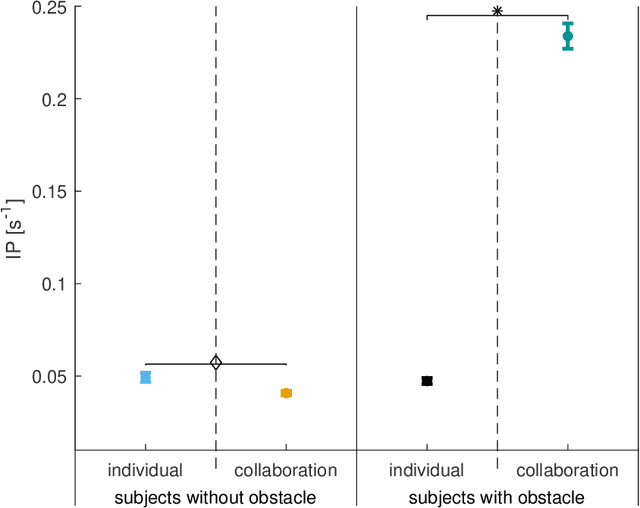
A question that many researchers in social robotics are addressing is how to create more human-like behaviour in robots to make the collaboration between a human and a robot more intuitive to the human partner. In order to develop a human-like collaborative robotic system, however, human collaboration must first be better understood. Human collaboration is something we are all familiar with, however not that much is known about it from a kinematic standpoint. One dynamic that hasn't been researched thoroughly, yet naturally occurs in human collaboration, is for instance leader-follower dynamics. In our previous study, we tackled the question of leader-follower role allocation in human dyads during a collaborative reaching task, where the results implied that the subjects who performed higher in the individual experiment would naturally assume the role of a leader when in physical collaboration. In this study, we build upon the leader-follower role allocation study in human dyads by observing how the leader-follower dynamics change when the collaborative task becomes more complex. Here, the study was performed on a reaching task, where one subject in a dyad was faced with an additional task of obstacle avoidance when performing a 2D reaching task, while their partner was not aware of the obstacle. We have found that subjects change their roles throughout the task in order to complete it successfully, however looking at the overall task leader the higher-performing individual will always dominate over the lower-performing one, regardless of whether they are aware of the additional task of obstacle avoidance or not.