 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGraspClutter6D: A Large-scale Real-world Dataset for Robust Perception and Grasping in Cluttered Scenes
Apr 09, 2025



Robust grasping in cluttered environments remains an open challenge in robotics. While benchmark datasets have significantly advanced deep learning methods, they mainly focus on simplistic scenes with light occlusion and insufficient diversity, limiting their applicability to practical scenarios. We present GraspClutter6D, a large-scale real-world grasping dataset featuring: (1) 1,000 highly cluttered scenes with dense arrangements (14.1 objects/scene, 62.6\% occlusion), (2) comprehensive coverage across 200 objects in 75 environment configurations (bins, shelves, and tables) captured using four RGB-D cameras from multiple viewpoints, and (3) rich annotations including 736K 6D object poses and 9.3B feasible robotic grasps for 52K RGB-D images. We benchmark state-of-the-art segmentation, object pose estimation, and grasping detection methods to provide key insights into challenges in cluttered environments. Additionally, we validate the dataset's effectiveness as a training resource, demonstrating that grasping networks trained on GraspClutter6D significantly outperform those trained on existing datasets in both simulation and real-world experiments. The dataset, toolkit, and annotation tools are publicly available on our project website: https://sites.google.com/view/graspclutter6d.
Learning to Place Unseen Objects Stably using a Large-scale Simulation
Mar 15, 2023



Object placement is a crucial task for robots in unstructured environments as it enables them to manipulate and arrange objects safely and efficiently. However, existing methods for object placement have limitations, such as the requirement for a complete 3D model of the object or the inability to handle complex object shapes, which restrict the applicability of robots in unstructured scenarios. In this paper, we propose an Unseen Object Placement (UOP) method that directly detects stable planes of unseen objects from a single-view and partial point cloud. We trained our model on large-scale simulation data to generalize over relationships between the shape and properties of stable planes with a 3D point cloud. We verify our approach through simulation and real-world robot experiments, demonstrating state-of-the-art performance for placing single-view and partial objects. Our UOP approach enables robots to place objects stably, even when the object's shape and properties are not fully known, providing a promising solution for object placement in unstructured environments. Our research has potential applications in various domains such as manufacturing, logistics, and home automation. Additional results can be viewed on https://sites.google.com/uop-net, and we will release our code, dataset upon publication.
Unseen Object Amodal Instance Segmentation via Hierarchical Occlusion Modeling
Sep 23, 2021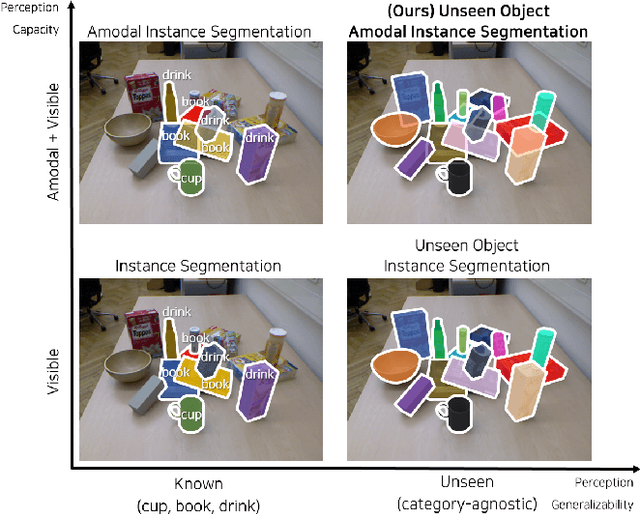
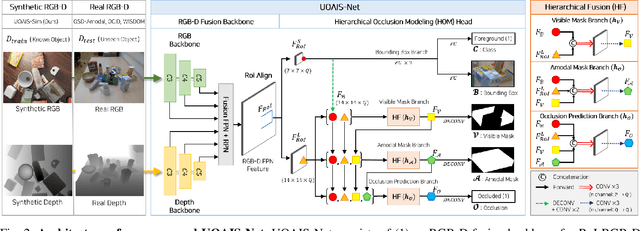
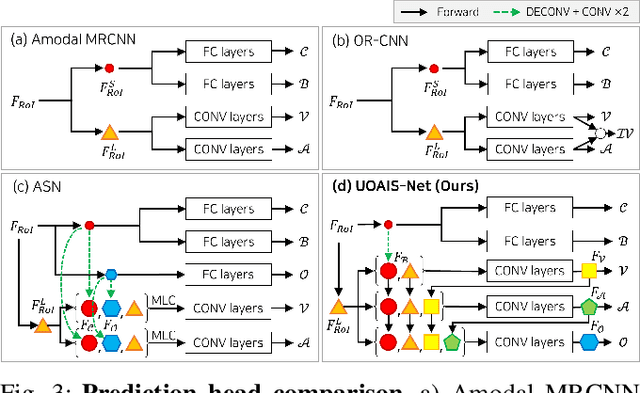

Instance-aware segmentation of unseen objects is essential for a robotic system in an unstructured environment. Although previous works achieved encouraging results, they were limited to segmenting the only visible regions of unseen objects. For robotic manipulation in a cluttered scene, amodal perception is required to handle the occluded objects behind others. This paper addresses Unseen Object Amodal Instance Segmentation (UOAIS) to detect 1) visible masks, 2) amodal masks, and 3) occlusions on unseen object instances. For this, we propose a Hierarchical Occlusion Modeling (HOM) scheme designed to reason about the occlusion by assigning a hierarchy to a feature fusion and prediction order. We evaluated our method on three benchmarks (tabletop, indoors, and bin environments) and achieved state-of-the-art (SOTA) performance. Robot demos for picking up occluded objects, codes, and datasets are available at https://sites.google.com/view/uoais