 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePath planning model of mobile robots in the context of crowds
Sep 10, 2020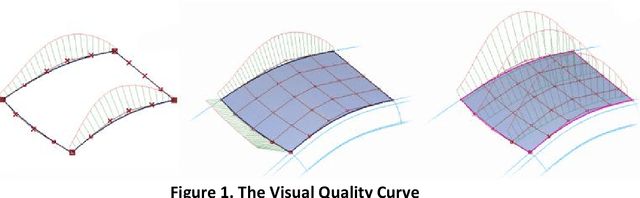
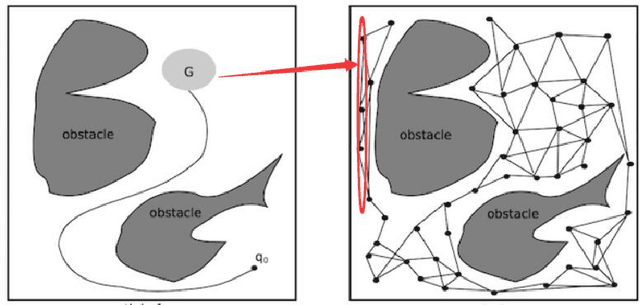
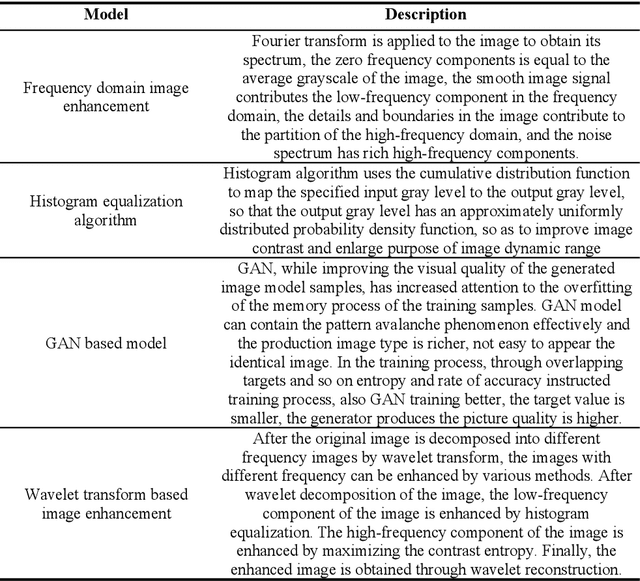
Robot path planning model based on RNN and visual quality evaluation in the context of crowds is analyzed in this paper. Mobile robot path planning is the key to robot navigation and an important field in robot research. Let the motion space of the robot be a two-dimensional plane, and the motion of the robot is regarded as a kind of motion under the virtual artificial potential field force when the artificial potential field method is used for the path planning. Compared to simple image acquisition, image acquisition in a complex crowd environment requires image pre-processing first. We mainly use OpenCV calibration tools to pre-process the acquired images. In themethodology design, the RNN-based visual quality evaluation to filter background noise is conducted. After calibration, Gaussian noise and some other redundant information affecting the subsequent operations still exist in the image. Based on RNN, a new image quality evaluation algorithm is developed, and denoising is performed on this basis. Furthermore, the novel path planning model is designed and simulated. The expeirment compared with the state-of-the-art models have shown the robustness of the model.
Scene recognition based on DNN and game theory with its applications in human-robot interaction
Jan 10, 2020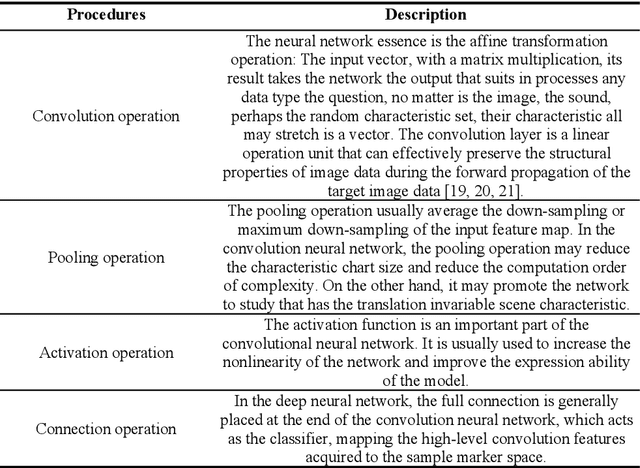


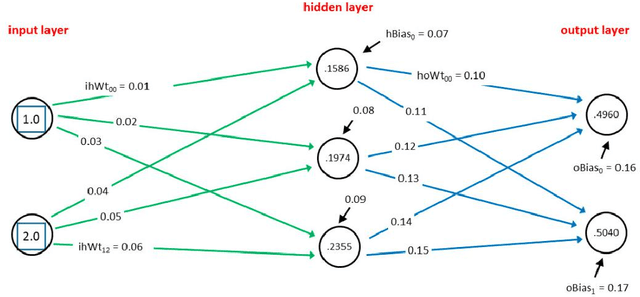
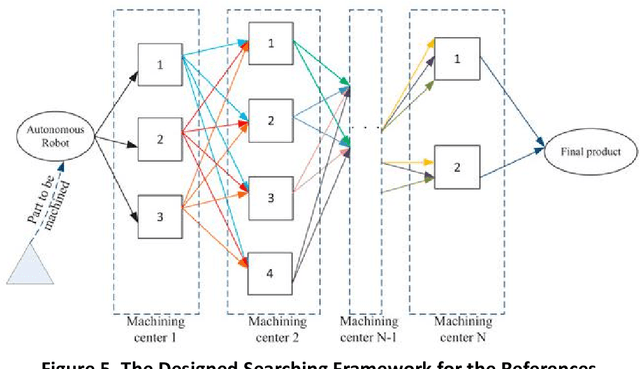
Scene recognition model based on the DNN and game theory with its applications in human-robot interaction is proposed in this paper. The use of deep learning methods in the field of scene recognition is still in its infancy, but has become an important trend in the future. As the innovative idea of the paper, we propose the following novelties. (1) In this paper, the image registration problem is transformed into a problem of minimum energy in Markov Random Field to finalize the image pre-processing task. Game theory is used to find the optimal. (2) We select neighboring homogeneous sample features and the neighboring heterogeneous sample features for the extracted sample features to build a triple and modify the traditional neural network to propose the novel DNN for scene understanding. (3) The robot control is well combined to guide the robot vision for multiple tasks. The experiment is then conducted to validate the overall performance.
Simplified_edition_Multi-robot SLAM Multi-view Target Tracking based on Panoramic Vision in Irregular Environment
Nov 22, 2019In order to improve the precision of multi-robot SLAM multi-view target tracking process, a improved multi-robot SLAM multi-view target tracking algorithm based on panoramic vision in irregular environment was put forward, adding an correction factor to renew the existing Extended Kalman Filter (EKF) model, obtaining new coordinates X and Y after twice iterations. The paper has been accepted by Computing and Visualization in Science and this is a simplified version.