 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAttempted Blind Constrained Descent Experiments
Feb 18, 2021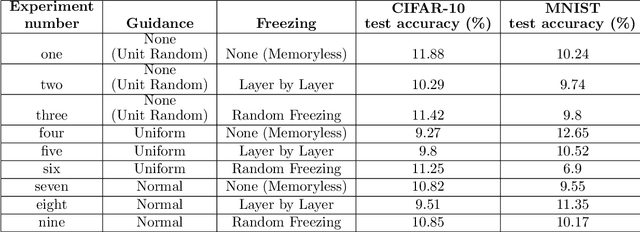
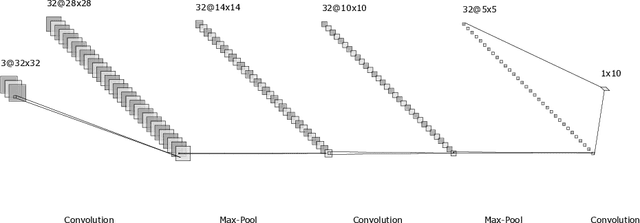
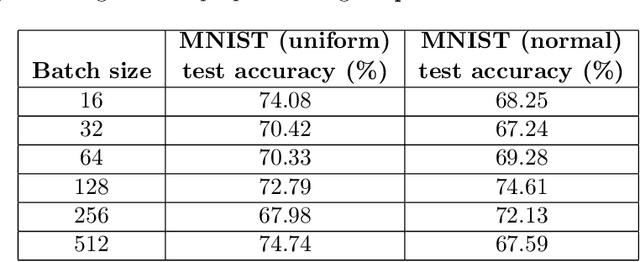

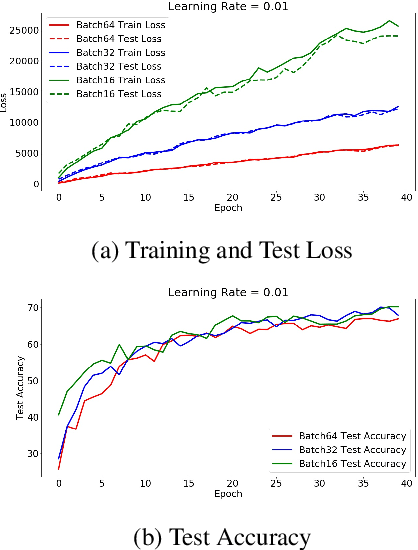
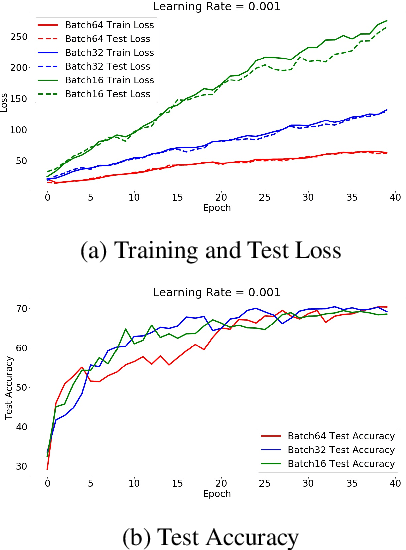
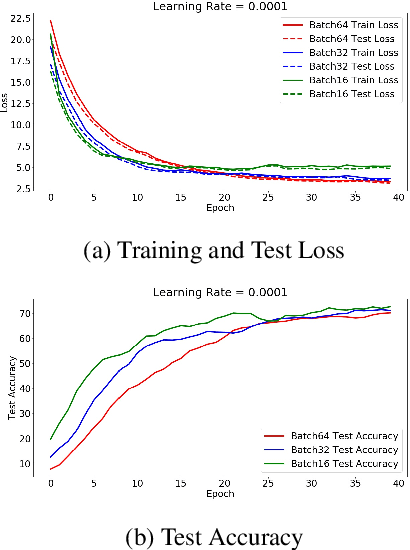
Blind Descent uses constrained but, guided approach to learn the weights. The probability density function is non-zero in the infinite space of the dimension (case in point: Gaussians and normal probability distribution functions). In Blind Descent paper, some of the implicit ideas involving layer by layer training and filter by filter training (with different batch sizes) were proposed as probable greedy solutions. The results of similar experiments are discussed. Octave (and proposed PyTorch variants) source code of the experiments of this paper can be found at https://github.com/PrasadNR/Attempted-Blind-Constrained-Descent-Experiments-ABCDE- . This is compared against the ABCDE derivatives of the original PyTorch source code of https://github.com/akshat57/Blind-Descent .
Blind Descent: A Prequel to Gradient Descent
Jun 20, 2020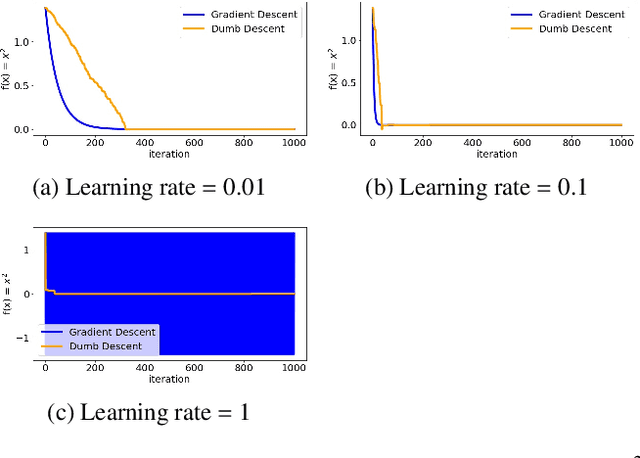
We describe an alternative to gradient descent for backpropogation through a neural network, which we call Blind Descent. We believe that Blind Descent can be used to augment backpropagation by using it as an initialisation method and can also be used at saturation. Blind Descent, inherently by design, does not face problems like exploding or vanishing gradients.
Monocular Imaging-based Autonomous Tracking for Low-cost Quad-rotor Design - TraQuad
Jan 21, 2018
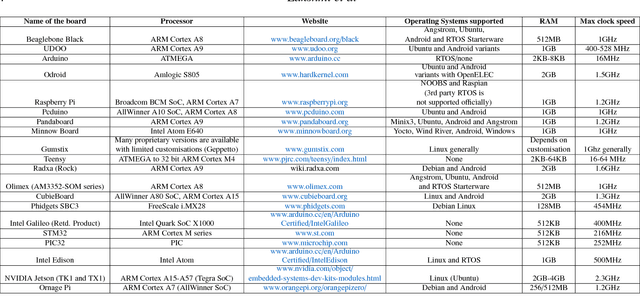
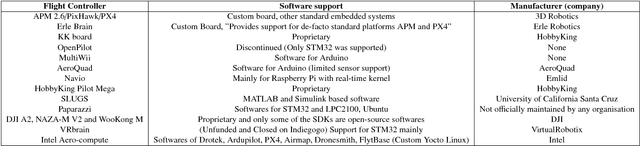
TraQuad is an autonomous tracking quadcopter capable of tracking any moving (or static) object like cars, humans, other drones or any other object on-the-go. This article describes the applications and advantages of TraQuad and the reduction in cost (to about 250$) that has been achieved so far using the hardware and software capabilities and our custom algorithms wherever needed. This description is backed by strong data and the research analyses which have been drawn out of extant information or conducted on own when necessary. This also describes the development of completely autonomous (even GPS is optional) low-cost drone which can act as a major platform for further developments in automation, transportation, reconnaissance and more. We describe our ROS Gazebo simulator and our STATUS algorithms which form the core of our development of our object tracking drone for generic purposes.