 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTrajectory control of a bipedal walking robot with inertial disc
Nov 22, 2013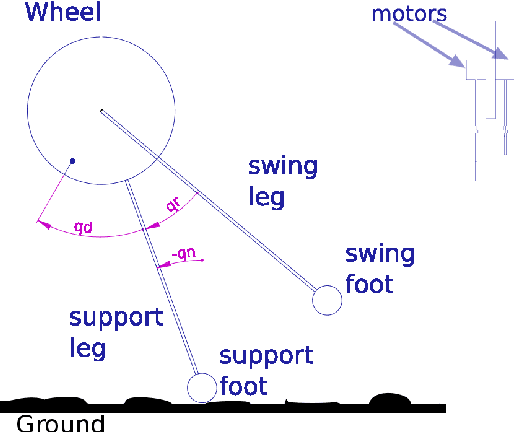
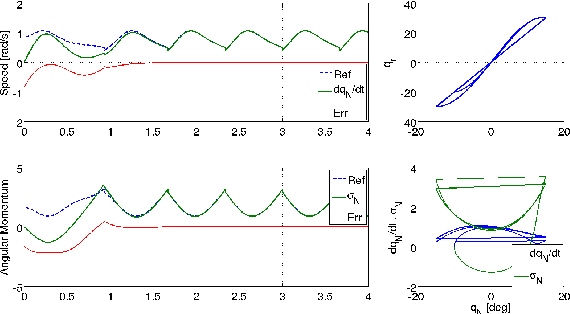
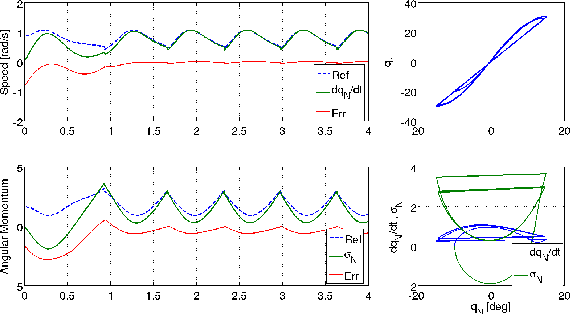
In this paper we exploit some interesting properties of a class of bipedal robots which have an inertial disc. One of this properties is the ability to control every position and speed except for the disc position. The proposed control is designed in two hierarchic levels. The first will drive the robot geometry, while the second will control the speed and also the angular momentum. The exponential stability of this approach is proved around some neighborhood of the nominal trajectory defining the geometry of the step. This control will not spend energy to adjust the disc position and neither to synchronize the trajectory with the time. The proposed control only takes action to correct the essential aspects of the walking gait. Computational simulations are presented for different conditions, serving as a empirical test for the neighborhood of attraction.
SO(3)-invariant asymptotic observers for dense depth field estimation based on visual data and known camera motion
Sep 29, 2011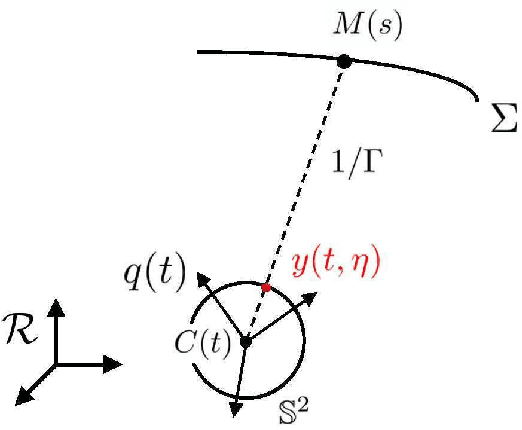
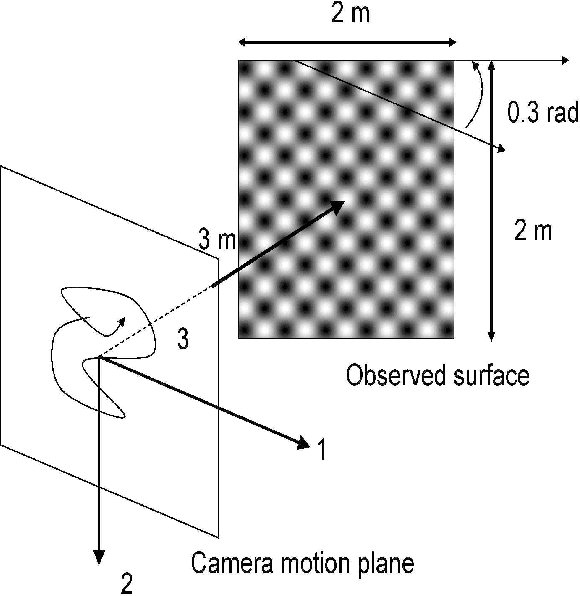
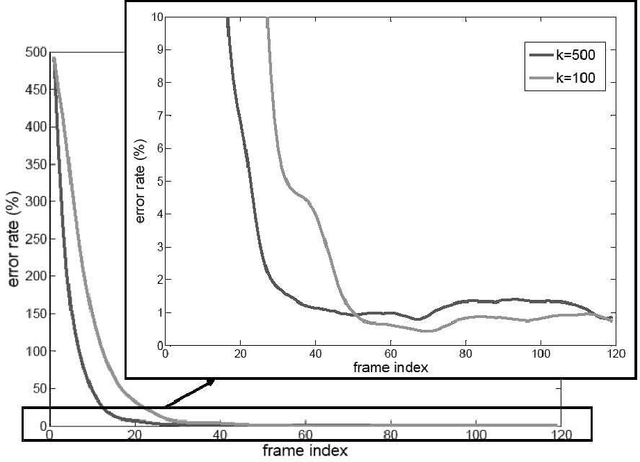
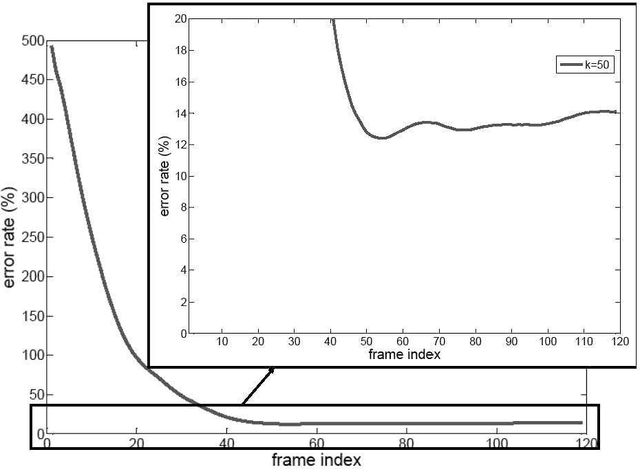
In this paper, we use known camera motion associated to a video sequence of a static scene in order to estimate and incrementally refine the surrounding depth field. We exploit the SO(3)-invariance of brightness and depth fields dynamics to customize standard image processing techniques. Inspired by the Horn-Schunck method, we propose a SO(3)-invariant cost to estimate the depth field. At each time step, this provides a diffusion equation on the unit Riemannian sphere that is numerically solved to obtain a real time depth field estimation of the entire field of view. Two asymptotic observers are derived from the governing equations of dynamics, respectively based on optical flow and depth estimations: implemented on noisy sequences of synthetic images as well as on real data, they perform a more robust and accurate depth estimation. This approach is complementary to most methods employing state observers for range estimation, which uniquely concern single or isolated feature points.