 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFinding Near-optimal Solutions in Multi-robot Path Planning
Oct 20, 2014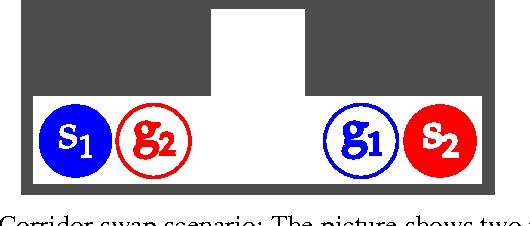
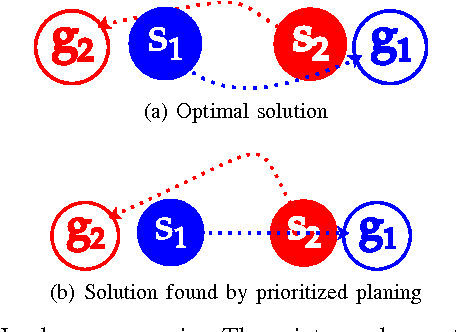
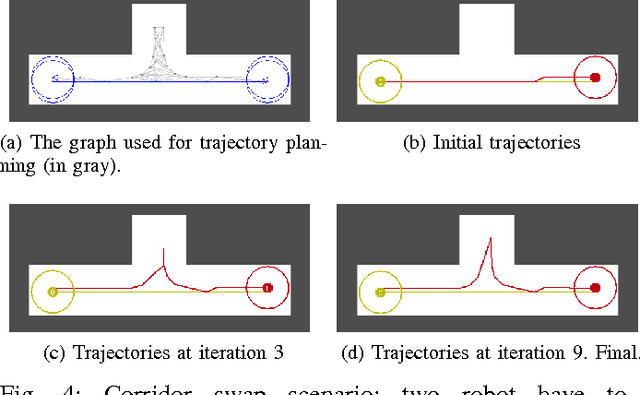
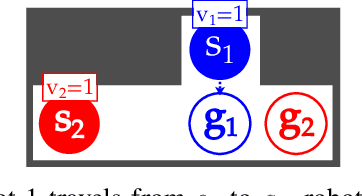
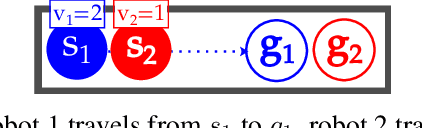
We deal with the problem of planning collision-free trajectories for robots operating in a shared space. Given the start and destination position for each of the robots, the task is to find trajectories for all robots that reach their destinations with minimum total cost such that the robots will not collide when following the found trajectories. Our approach starts from individually optimal trajectory for each robot, which are then penalized for being in collision with other robots. The penalty is gradually increased and the individual trajectories are iteratively replanned to account for the increased penalty until a collision-free solution is found. Using extensive experimental evaluation, we find that such a penalty method constructs trajectories with near-optimal cost on the instances where the optimum is known and otherwise with 4-10 % lower cost than the trajectories generated by prioritized planning and up to 40 % cheaper than trajectories generated by local collision avoidance techniques, such as ORCA.
Prioritized Planning Algorithms for Trajectory Coordination of Multiple Mobile Robots
Sep 08, 2014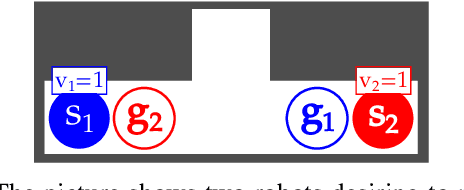
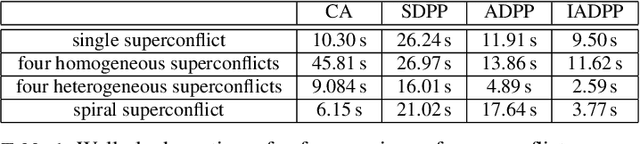
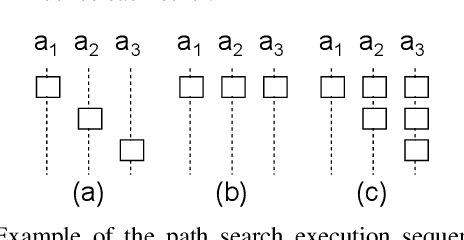
An important capability of autonomous multi-robot systems is to prevent collision among the individual robots. One approach to this problem is to plan conflict-free trajectories and let each of the robots follow its pre-planned trajectory. A widely used practical method for multi-robot trajectory planning is prioritized planning, which has been shown to be effective in practice, but is in general incomplete. Formal analysis of instances that are provably solvable by prioritized planning is still missing. Moreover, prioritized planning is a centralized algorithm, which may be in many situations undesirable. In this paper we a) propose a revised version of prioritized planning and characterize the class of instances that are provably solvable by the algorithm and b) propose an asynchronous decentralized variant of prioritized planning, which maintains the desirable properties of the centralized version and in the same time exploits the distributed computational power of the individual robots, which in most situations allows to find the joint trajectories faster. The experimental evaluation performed on real-world indoor maps shows that a) the revised version of prioritized planning reliably solves a wide class of instances on which both classical prioritized planning and popular reactive technique ORCA fail and b) the asynchronous decentralized algorithm provides solution faster than the previously proposed synchronized decentralized algorithm.
On the cost-complexity of multi-context systems
May 28, 2014Multi-context systems provide a powerful framework for modelling information-aggregation systems featuring heterogeneous reasoning components. Their execution can, however, incur non-negligible cost. Here, we focus on cost-complexity of such systems. To that end, we introduce cost-aware multi-context systems, an extension of non-monotonic multi-context systems framework taking into account costs incurred by execution of semantic operators of the individual contexts. We formulate the notion of cost-complexity for consistency and reasoning problems in MCSs. Subsequently, we provide a series of results related to gradually more and more constrained classes of MCSs and finally introduce an incremental cost-reducing algorithm solving the reasoning problem for definite MCSs.
Multi-agent RRT*: Sampling-based Cooperative Pathfinding (Extended Abstract)
Feb 12, 2013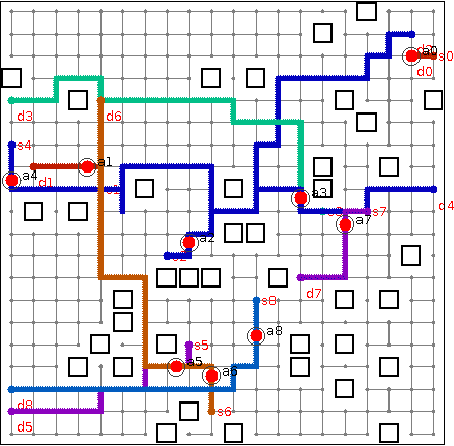
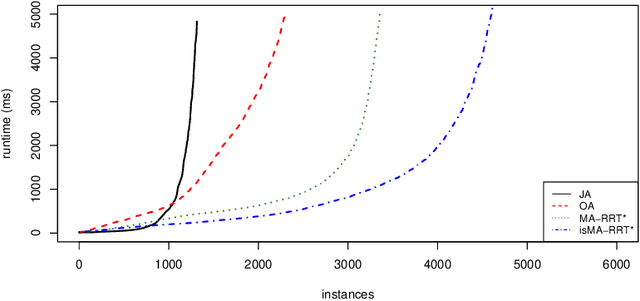
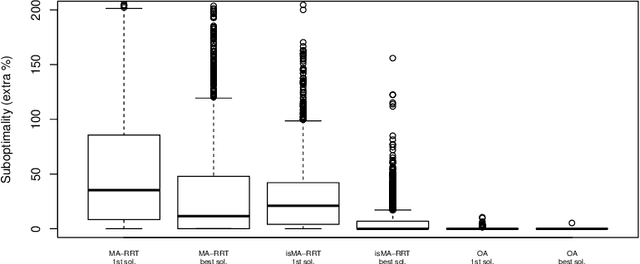
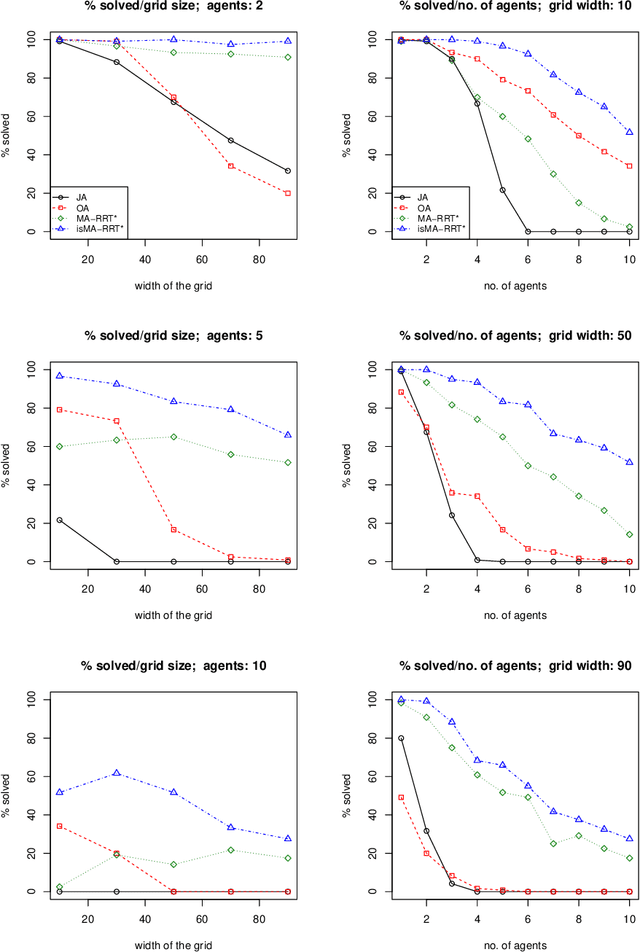
Cooperative pathfinding is a problem of finding a set of non-conflicting trajectories for a number of mobile agents. Its applications include planning for teams of mobile robots, such as autonomous aircrafts, cars, or underwater vehicles. The state-of-the-art algorithms for cooperative pathfinding typically rely on some heuristic forward-search pathfinding technique, where A* is often the algorithm of choice. Here, we propose MA-RRT*, a novel algorithm for multi-agent path planning that builds upon a recently proposed asymptotically-optimal sampling-based algorithm for finding single-agent shortest path called RRT*. We experimentally evaluate the performance of the algorithm and show that the sampling-based approach offers better scalability than the classical forward-search approach in relatively large, but sparse environments, which are typical in real-world applications such as multi-aircraft collision avoidance.
Asynchronous Decentralized Algorithm for Space-Time Cooperative Pathfinding
Oct 25, 2012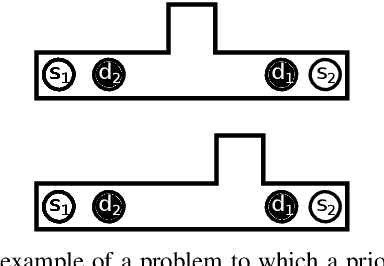
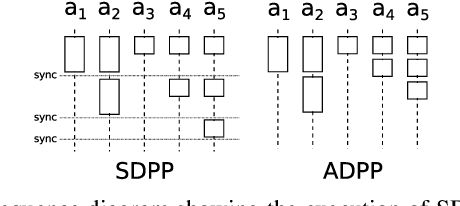
Cooperative pathfinding is a multi-agent path planning problem where a group of vehicles searches for a corresponding set of non-conflicting space-time trajectories. Many of the practical methods for centralized solving of cooperative pathfinding problems are based on the prioritized planning strategy. However, in some domains (e.g., multi-robot teams of unmanned aerial vehicles, autonomous underwater vehicles, or unmanned ground vehicles) a decentralized approach may be more desirable than a centralized one due to communication limitations imposed by the domain and/or privacy concerns. In this paper we present an asynchronous decentralized variant of prioritized planning ADPP and its interruptible version IADPP. The algorithm exploits the inherent parallelism of distributed systems and allows for a speed up of the computation process. Unlike the synchronized planning approaches, the algorithm allows an agent to react to updates about other agents' paths immediately and invoke its local spatio-temporal path planner to find the best trajectory, as response to the other agents' choices. We provide a proof of correctness of the algorithms and experimentally evaluate them on synthetic domains.
Decentralized Multi-agent Plan Repair in Dynamic Environments
Feb 13, 2012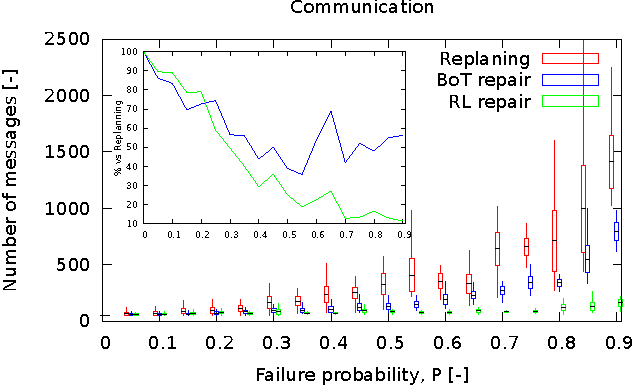
Achieving joint objectives by teams of cooperative planning agents requires significant coordination and communication efforts. For a single-agent system facing a plan failure in a dynamic environment, arguably, attempts to repair the failed plan in general do not straightforwardly bring any benefit in terms of time complexity. However, in multi-agent settings the communication complexity might be of a much higher importance, possibly a high communication overhead might be even prohibitive in certain domains. We hypothesize that in decentralized systems, where coordination is enforced to achieve joint objectives, attempts to repair failed multi-agent plans should lead to lower communication overhead than replanning from scratch. The contribution of the presented paper is threefold. Firstly, we formally introduce the multi-agent plan repair problem and formally present the core hypothesis underlying our work. Secondly, we propose three algorithms for multi-agent plan repair reducing the problem to specialized instances of the multi-agent planning problem. Finally, we present results of experimental validation confirming the core hypothesis of the paper.