 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePyramidal Blur Aware X-Corner Chessboard Detector
Oct 26, 2021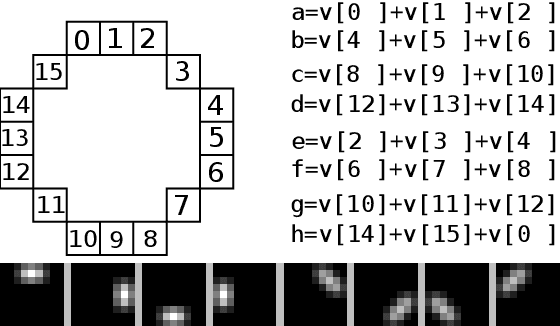
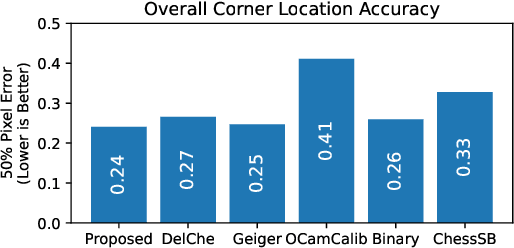
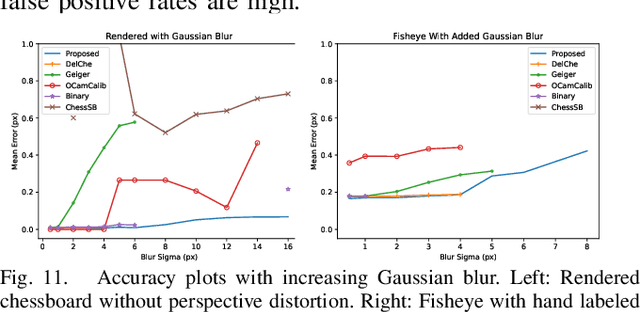
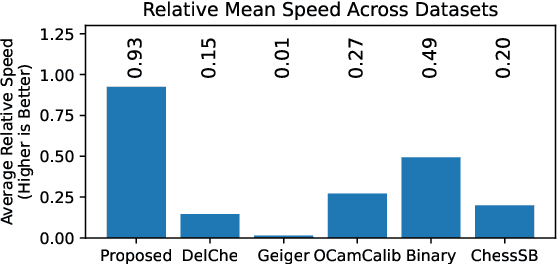
With camera resolution ever increasing and the need to rapidly recalibrate robotic platforms in less than ideal environments, there is a need for faster and more robust chessboard fiducial marker detectors. A new chessboard detector is proposed that is specifically designed for: high resolution images, focus/motion blur, harsh lighting conditions, and background clutter. This is accomplished using a new x-corner detector, where for the first time blur is estimated and used in a novel way to enhance corner localization, edge validation, and connectivity. Performance is measured and compared against other libraries using a diverse set of images created by combining multiple third party datasets and including new specially crafted scenarios designed to stress the state-of-the-art. The proposed detector has the best F1- Score of 0.97, runs 1.9x faster than next fastest, and is a top performer for corner accuracy, while being the only detector to have consistent good performance in all scenarios.
Resolving Implementation Ambiguity and Improving SURF
Mar 03, 2012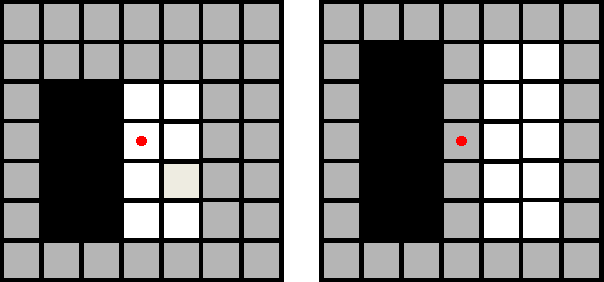
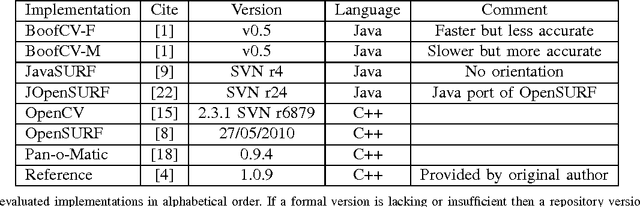
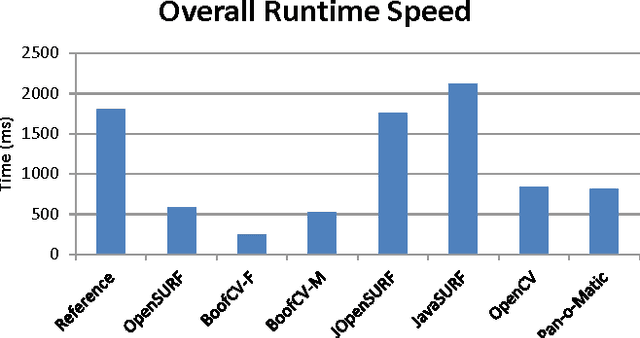
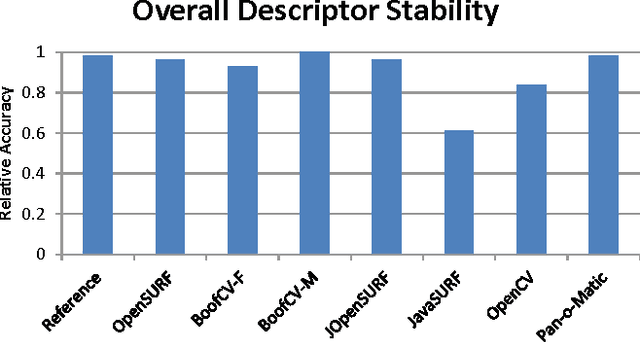
Speeded Up Robust Features (SURF) has emerged as one of the more popular feature descriptors and detectors in recent years. Performance and algorithmic details vary widely between implementations due to SURF's complexity and ambiguities found in its description. To resolve these ambiguities, a set of general techniques for feature stability is defined based on the smoothness rule. Additional improvements to SURF are proposed for speed and stability. To illustrate the importance of these implementation details, a performance study of popular SURF implementations is done. By utilizing all the suggested improvements, it is possible to create a SURF implementation that is several times faster and more stable.