 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnhancing ECG Classification Robustness with Lightweight Unsupervised Anomaly Detection Filters
Oct 30, 2025Continuous electrocardiogram (ECG) monitoring via wearables offers significant potential for early cardiovascular disease (CVD) detection. However, deploying deep learning models for automated analysis in resource-constrained environments faces reliability challenges due to inevitable Out-of-Distribution (OOD) data. OOD inputs, such as unseen pathologies or noisecorrupted signals, often cause erroneous, high-confidence predictions by standard classifiers, compromising patient safety. Existing OOD detection methods either neglect computational constraints or address noise and unseen classes separately. This paper explores Unsupervised Anomaly Detection (UAD) as an independent, upstream filtering mechanism to improve robustness. We benchmark six UAD approaches, including Deep SVDD, reconstruction-based models, Masked Anomaly Detection, normalizing flows, and diffusion models, optimized via Neural Architecture Search (NAS) under strict resource constraints (at most 512k parameters). Evaluation on PTB-XL and BUT QDB datasets assessed detection of OOD CVD classes and signals unsuitable for analysis due to noise. Results show Deep SVDD consistently achieves the best trade-off between detection and efficiency. In a realistic deployment simulation, integrating the optimized Deep SVDD filter with a diagnostic classifier improved accuracy by up to 21 percentage points over a classifier-only baseline. This study demonstrates that optimized UAD filters can safeguard automated ECG analysis, enabling safer, more reliable continuous cardiovascular monitoring on wearables.
PuzzleBoard: A New Camera Calibration Pattern with Position Encoding
Sep 30, 2024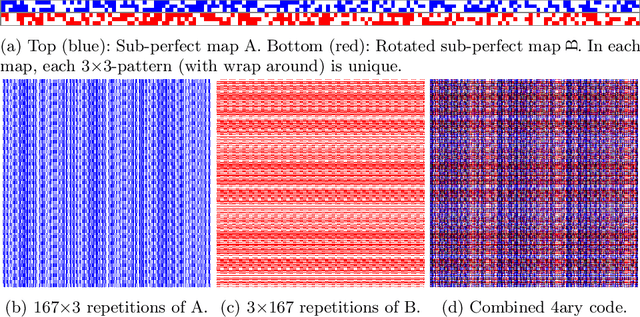
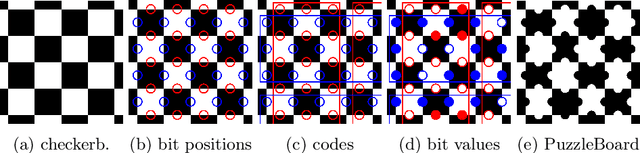
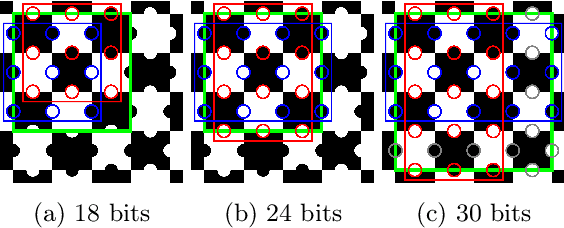
Accurate camera calibration is a well-known and widely used task in computer vision that has been researched for decades. However, the standard approach based on checkerboard calibration patterns has some drawbacks that limit its applicability. For example, the calibration pattern must be completely visible without any occlusions. Alternative solutions such as ChArUco boards allow partial occlusions, but require a higher camera resolution due to the fine details of the position encoding. We present a new calibration pattern that combines the advantages of checkerboard calibration patterns with a lightweight position coding that can be decoded at very low resolutions. The decoding algorithm includes error correction and is computationally efficient. The whole approach is backward compatible to both checkerboard calibration patterns and several checkerboard calibration algorithms. Furthermore, the method can be used not only for camera calibration but also for camera pose estimation and marker-based object localization tasks.