 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeQuantumGS: Quantum Encoding Framework for Gaussian Splatting
Feb 04, 2026Recent advances in neural rendering, particularly 3D Gaussian Splatting (3DGS), have enabled real-time rendering of complex scenes. However, standard 3DGS relies on spherical harmonics, which often struggle to accurately capture high-frequency view-dependent effects such as sharp reflections and transparency. While hybrid approaches like Viewing Direction Gaussian Splatting (VDGS) mitigate this limitation using classical Multi-Layer Perceptrons (MLPs), they remain limited by the expressivity of classical networks in low-parameter regimes. In this paper, we introduce QuantumGS, a novel hybrid framework that integrates Variational Quantum Circuits (VQC) into the Gaussian Splatting pipeline. We propose a unique encoding strategy that maps the viewing direction directly onto the Bloch sphere, leveraging the natural geometry of qubits to represent 3D directional data. By replacing classical color-modulating networks with quantum circuits generated via a hypernetwork or conditioning mechanism, we achieve higher expressivity and better generalization. Source code is available in the supplementary material. Code is available at https://github.com/gwilczynski95/QuantumGS
POMO+: Leveraging starting nodes in POMO for solving Capacitated Vehicle Routing Problem
Aug 11, 2025



In recent years, reinforcement learning (RL) methods have emerged as a promising approach for solving combinatorial problems. Among RL-based models, POMO has demonstrated strong performance on a variety of tasks, including variants of the Vehicle Routing Problem (VRP). However, there is room for improvement for these tasks. In this work, we improved POMO, creating a method (\textbf{POMO+}) that leverages the initial nodes to find a solution in a more informed way. We ran experiments on our new model and observed that our solution converges faster and achieves better results. We validated our models on the CVRPLIB dataset and noticed improvements in problem instances with up to 100 customers. We hope that our research in this project can lead to further advancements in the field.
URB -- Urban Routing Benchmark for RL-equipped Connected Autonomous Vehicles
May 23, 2025



Connected Autonomous Vehicles (CAVs) promise to reduce congestion in future urban networks, potentially by optimizing their routing decisions. Unlike for human drivers, these decisions can be made with collective, data-driven policies, developed by machine learning algorithms. Reinforcement learning (RL) can facilitate the development of such collective routing strategies, yet standardized and realistic benchmarks are missing. To that end, we present \our{}: Urban Routing Benchmark for RL-equipped Connected Autonomous Vehicles. \our{} is a comprehensive benchmarking environment that unifies evaluation across 29 real-world traffic networks paired with realistic demand patterns. \our{} comes with a catalog of predefined tasks, four state-of-the-art multi-agent RL (MARL) algorithm implementations, three baseline methods, domain-specific performance metrics, and a modular configuration scheme. Our results suggest that, despite the lengthy and costly training, state-of-the-art MARL algorithms rarely outperformed humans. Experimental results reported in this paper initiate the first leaderboard for MARL in large-scale urban routing optimization and reveal that current approaches struggle to scale, emphasizing the urgent need for advancements in this domain.
Predicting times of waiting on red signals using BERT
Feb 20, 2021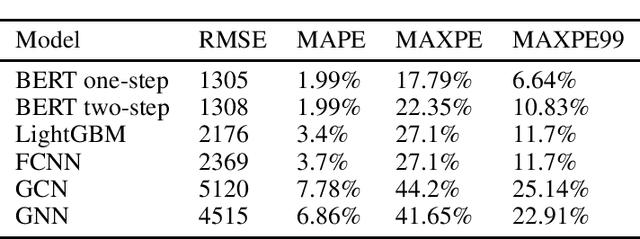
We present a method for approximating outcomes of road traffic simulations using BERT-based models, which may find applications in, e.g., optimizing traffic signal settings, especially with the presence of autonomous and connected vehicles. The experiments were conducted on a dataset generated using the Traffic Simulation Framework software runs on a realistic road network. The BERT-based models were compared with 4 other types of machine learning models (LightGBM, fully connected neural networks and 2 types of graph neural networks) and gave the best results in terms of all the considered metrics.
Investigating performance of neural networks and gradient boosting models approximating microscopic traffic simulations in traffic optimization tasks
Dec 11, 2018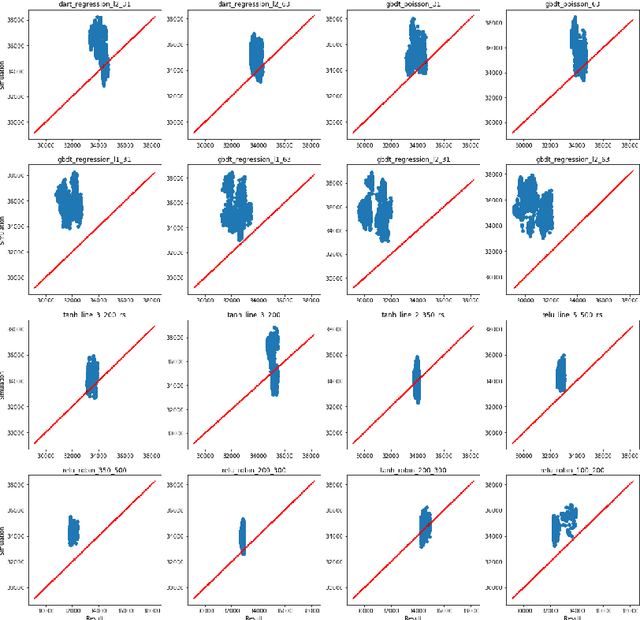
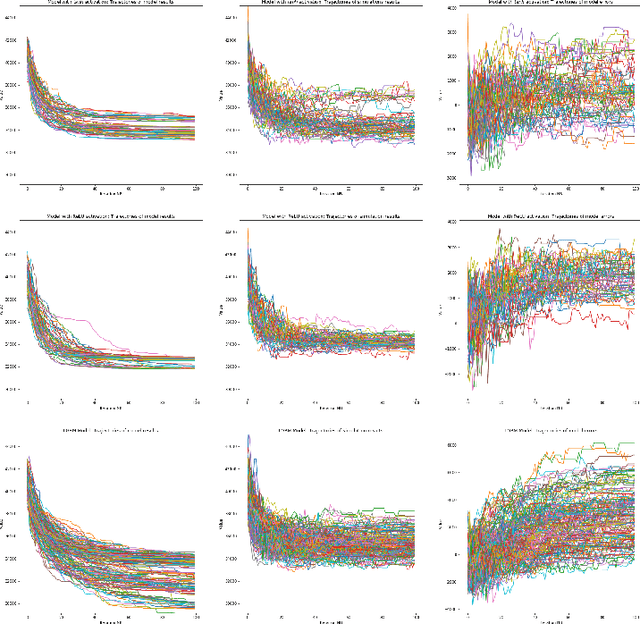
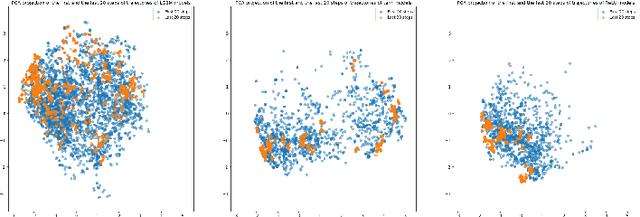
We analyze the accuracy of traffic simulations metamodels based on neural networks and gradient boosting models (LightGBM), applied to traffic optimization as fitness functions of genetic algorithms. Our metamodels approximate outcomes of traffic simulations (the total time of waiting on a red signal) taking as an input different traffic signal settings, in order to efficiently find (sub)optimal settings. Their accuracy was proven to be very good on randomly selected test sets, but it turned out that the accuracy may drop in case of settings expected (according to genetic algorithms) to be close to local optima, which makes the traffic optimization process more difficult. In this work, we investigate 16 different metamodels and 20 settings of genetic algorithms, in order to understand what are the reasons of this phenomenon, what is its scale, how it can be mitigated and what can be potentially done to design better real-time traffic optimization methods.