 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStructural & Granger CAUSALITY for IoT Digital Twin
Mar 08, 2022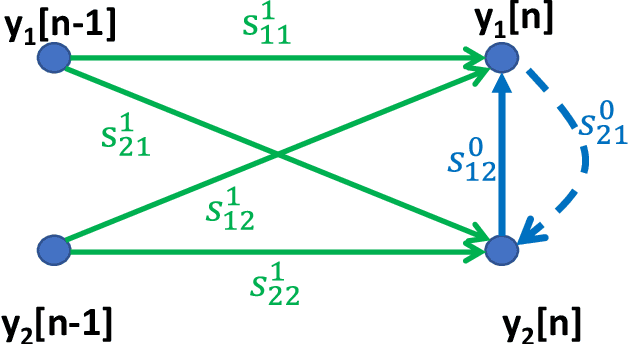
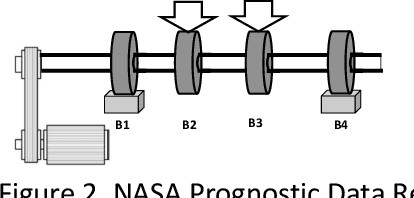
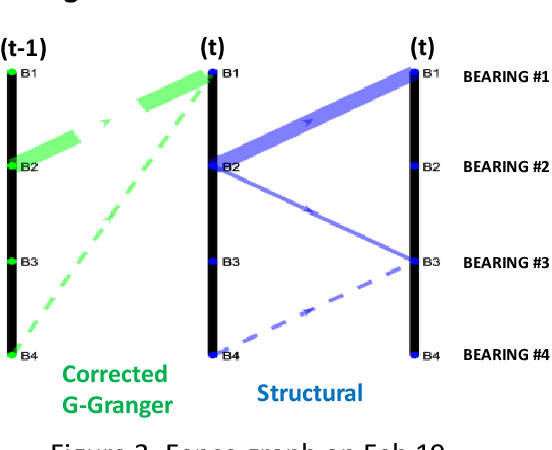
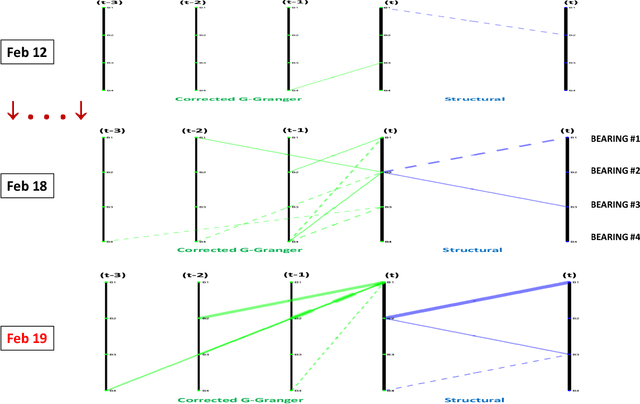
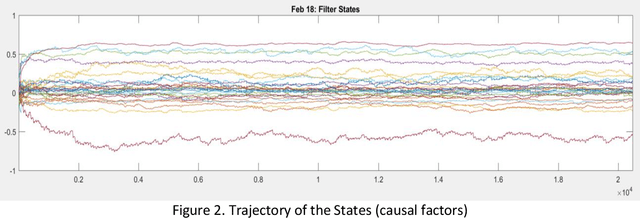
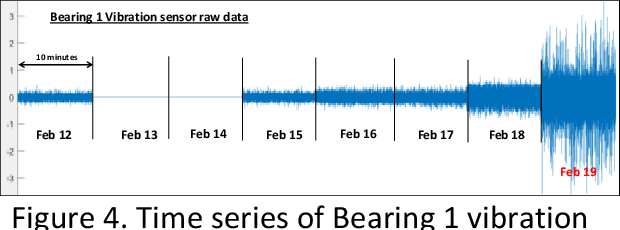
In this foundational expository article on the application of Causality Analysis in IoT, we establish the basic theory and algorithms for estimating Structural and Granger causality factors from measured multichannel sensor data (vector timeseries). Vector timeseries is modeled as a Structural Vector Autoregressive (SVAR) model; utilizing Kalman Filter and Independent Component Analysis (ICA) methods, Structural and generalized Granger causality factors are estimated. The estimated causal factors are presented as a Fence graph which we call Causal Digital Twin. Practical applications of Causal Digital Twin are demonstrated on NASA Prognostic Data Repository Bearing data collection. Use of Causal Digital Twin for counterfactual experiments are indicated. Causal Digital Twin is a horizontal solution that applies to diverse use cases in multiple industries such as Industrial, Manufacturing, Automotive, Consumer, Building and Smart City.
Causal Digital Twin from Multi-channel IoT
Jun 03, 2021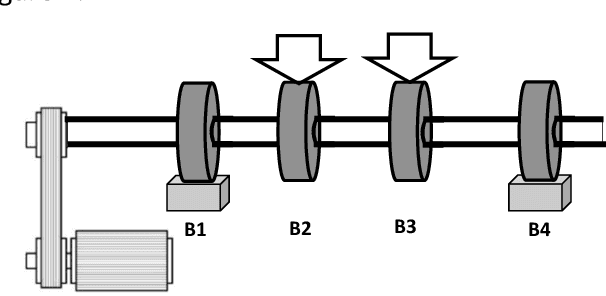
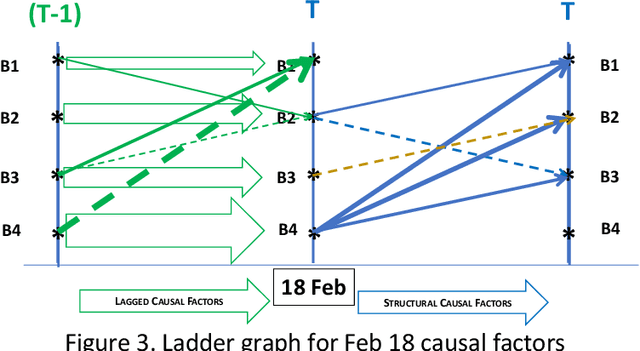
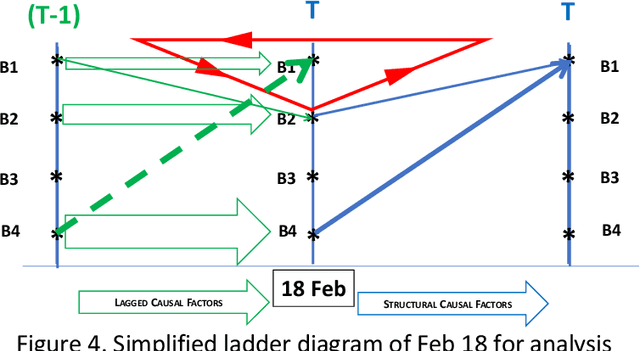
Treating data from each sensor in an IoT installation on its own separately is wasteful. This article shows how to treat them as a multi-channel time series and introduces the State-space model formulation of Structural Vector Autoregressive (SVAR) model and the use of time-varying Kalman Filter for optimal estimation of causal parameters. Ladder graphs are introduced as a powerful visualization tool for SVAR estimates where both instantaneous and lagged causal factors are displayed and interactions analyzed. Ladder Graph IS the Causal Digital Twin (CDT); its use for multiple IoT applications that involve multi-channel time series are explored briefly. The main takeaway is that the NEXT STEP in IoT ML is the utilization of data from multiple sensors collectively as a single multi-channel time series. This article shows the way to do it and extract high-order (causal) information via our ladder graph based Causal Digital Twin.
Stochastic Formulation of Causal Digital Twin: Kalman Filter Algorithm
May 11, 2021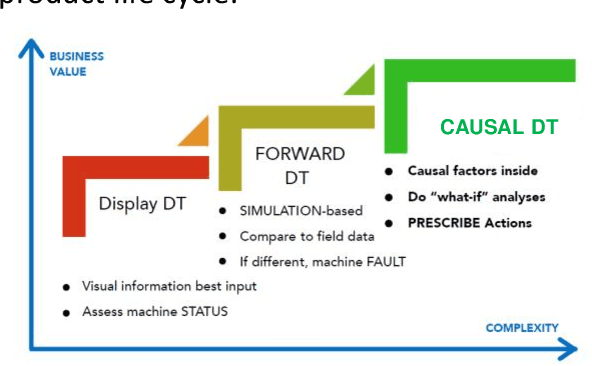
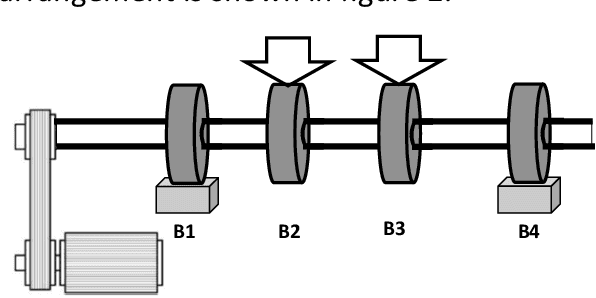

We provide some basic and sensible definitions of different types of digital twins and recommendations on when and how to use them. Following up on our recent publication of the Learning Causal Digital Twin, this article reports on a stochastic formulation and solution of the problem. Structural Vector Autoregressive Model (SVAR) for Causal estimation is recast as a state-space model. Kalman filter (and smoother) is then employed to estimate causal factors in a system of connected machine bearings. The previous neural network algorithm and Kalman Smoother produced very similar results; however, Kalman Filter/Smoother may show better performance for noisy data from industrial IoT sources.
Evidence-based Prescriptive Analytics, CAUSAL Digital Twin and a Learning Estimation Algorithm
Apr 12, 2021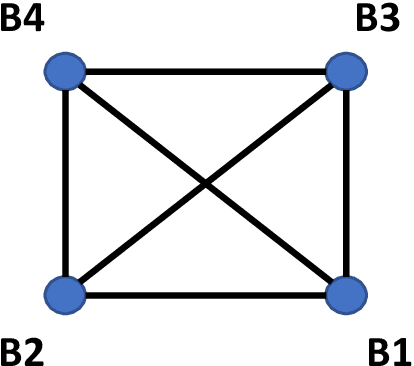
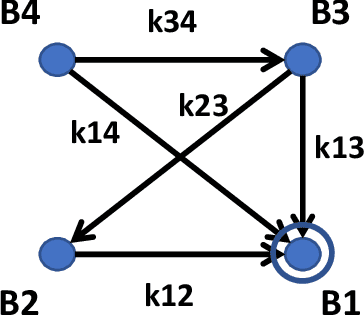
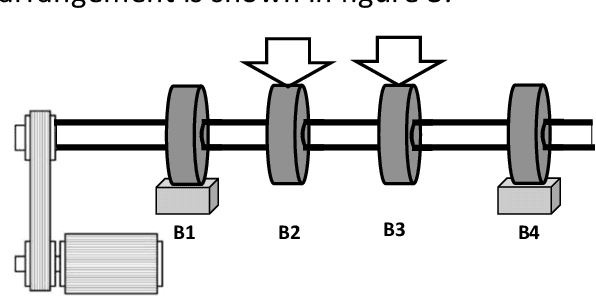
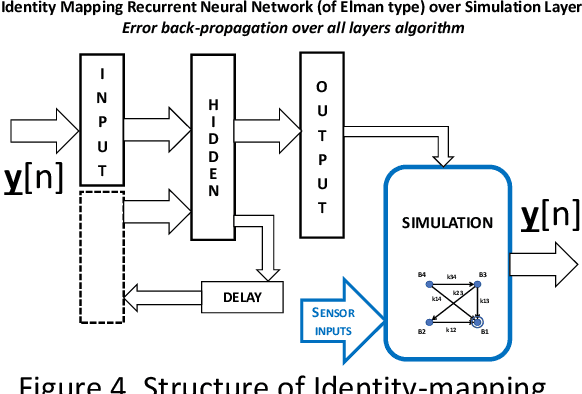
Evidence-based Prescriptive Analytics (EbPA) is necessary to determine optimal operational set-points that will improve business productivity. EbPA results from what-if analysis and counterfactual experimentation on CAUSAL Digital Twins (CDTs) that quantify cause-effect relationships in the DYNAMICS of a system of connected assets. We describe the basics of Causality and Causal Graphs and develop a Learning Causal Digital Twin (LCDT) solution; our algorithm uses a simple recurrent neural network with some innovative modifications incorporating Causal Graph simulation. Since LCDT is a learning digital twin where parameters are learned online in real-time with minimal pre-configuration, the work of deploying digital twins will be significantly simplified. A proof-of-principle of LCDT was conducted using real vibration data from a system of bearings; results of causal factor estimation, what-if analysis study and counterfactual experiment are very encouraging.