 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Geometric Approach to On-road Motion Planning for Long and Multi-Body Heavy-Duty Vehicles
Oct 15, 2020
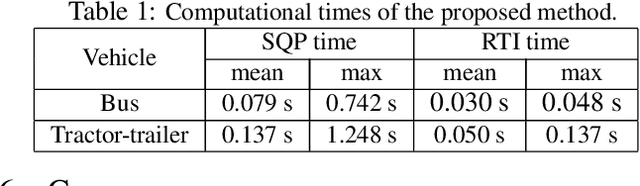
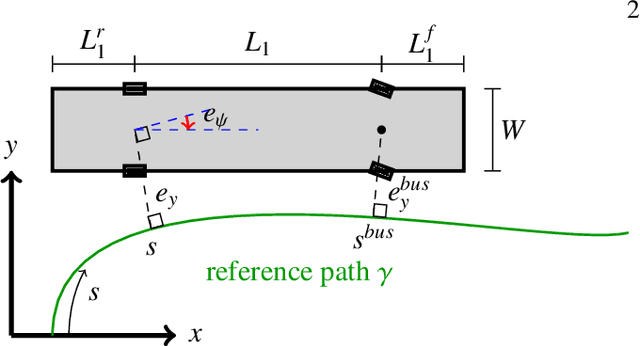
Driving heavy-duty vehicles, such as buses and tractor-trailer vehicles, is a difficult task in comparison to passenger cars. Most research on motion planning for autonomous vehicles has focused on passenger vehicles, and many unique challenges associated with heavy-duty vehicles remain open. However, recent works have started to tackle the particular difficulties related to on-road motion planning for buses and tractor-trailer vehicles using numerical optimization approaches. In this work, we propose a framework to design an optimization objective to be used in motion planners. Based on geometric derivations, the method finds the optimal trade-off between the conflicting objectives of centering different axles of the vehicle in the lane. For the buses, we consider the front and rear axles trade-off, whereas for articulated vehicles, we consider the tractor and trailer rear axles trade-off. Our results show that the proposed design strategy results in planned paths that considerably improve the behavior of heavy-duty vehicles by keeping the whole vehicle body in the center of the lane.
Estimation-aware model predictive path-following control for a general 2-trailer with a car-like tractor
Mar 07, 2020
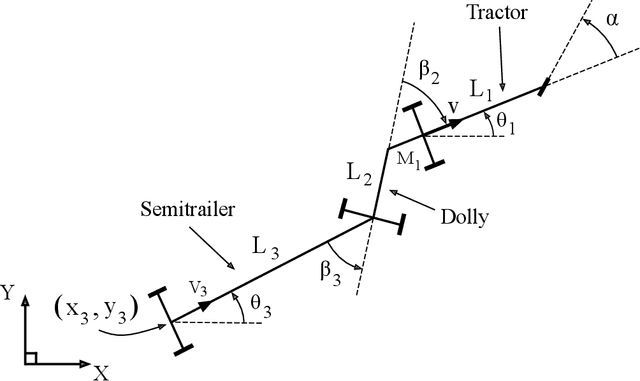
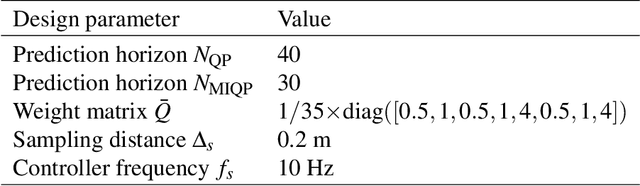
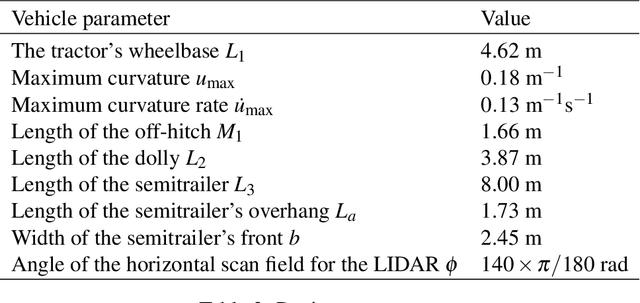
The design of the path-following controller is crucial for reliable autonomous vehicle operation. This design problem is especially challenging for a general 2-trailer with a car-like tractor due to the vehicle's unstable joint-angle kinematics in backward motion. Additionally, advanced sensors placed in the rear of the tractor have been proposed to solve the joint-angle estimation problem. Since these sensors typically have a limited field of view, the estimation solution introduces restrictions on the joint-angle configurations that can be estimated with high accuracy. To explicitly consider these constraints in the controller, a model predictive path-following control approach is proposed. Two approaches with different computation complexity and performance are presented. In the first approach, the joint-angle constraints are modeled as a union of convex polytopes, making it necessary to incorporate binary decision variables. The second approach avoids binary variables at the expense of a more conservative controller. In simulations and field experiments, the performance of the proposed path-following control approach is compared with a previously proposed control strategy.
On sensing-aware model predictive path-following control for a reversing general 2-trailer with a car-like tractor
Feb 20, 2020
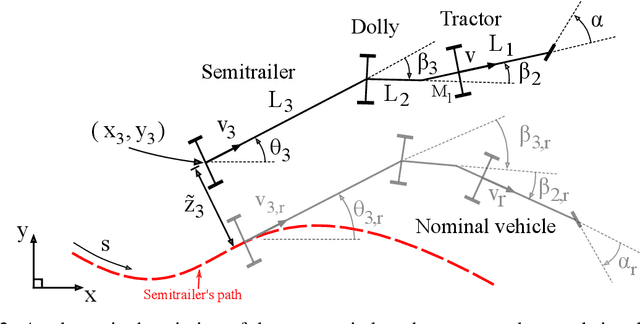
The design of reliable path-following controllers is a key ingredient for successful deployment of self-driving vehicles. This controller-design problem is especially challenging for a general 2-trailer with a car-like tractor due to the vehicle's structurally unstable joint-angle kinematics in backward motion and the car-like tractor's curvature limitations which can cause the vehicle segments to fold and enter a jackknife state. Furthermore, advanced sensors with a limited field of view have been proposed to solve the joint-angle estimation problem online, which introduce additional restrictions on which vehicle states that can be reliably estimated. To incorporate these restrictions at the level of control, a model predictive path-following controller is proposed. By taking the vehicle's physical and sensing limitations into account, it is shown in real-world experiments that the performance of the proposed path-following controller in terms of suppressing disturbances and recovering from non-trivial initial states is significantly improved compared to a previously proposed solution where the constraints have been neglected.
Optimization-Based On-Road Path Planning for Articulated Vehicles
Jan 19, 2020
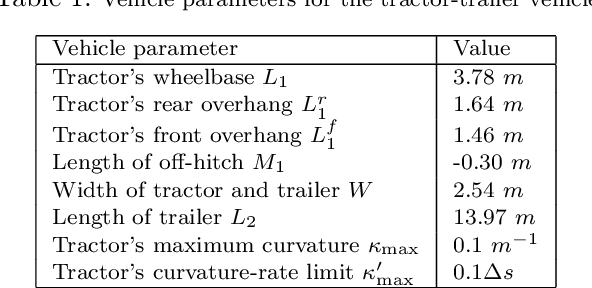
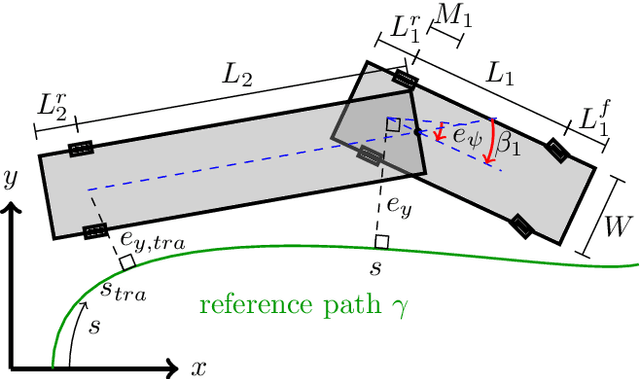
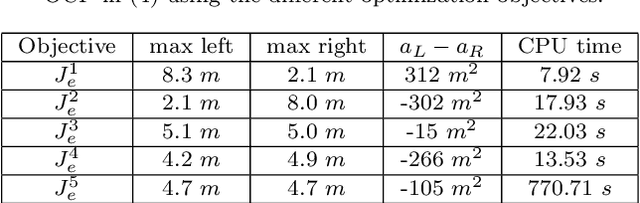
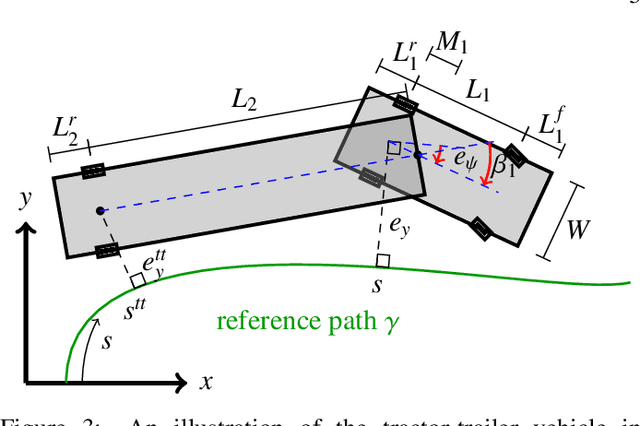
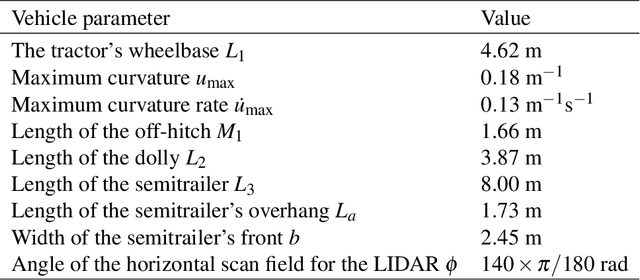
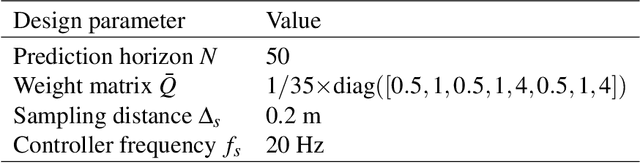
Maneuvering an articulated vehicle on narrow road stretches is often a challenging task for a human driver. Unless the vehicle is accurately steered, parts of the vehicle's bodies may exceed its assigned drive lane, resulting in an increased risk of collision with surrounding traffic. In this work, an optimization-based path-planning algorithm is proposed targeting on-road driving scenarios for articulated vehicles composed of a tractor and a trailer. To this end, we model the tractor-trailer vehicle in a road-aligned coordinate frame suited for on-road planning. Based on driving heuristics, a set of different optimization objectives is proposed, with the overall goal of designing a path planner that computes paths which minimize the off-track of the vehicle bodies swept area, while remaining on the road and avoiding collision with obstacles. The proposed optimization-based path-planning algorithm, together with the different optimization objectives, is evaluated and analyzed in simulations on a set of complicated and practically relevant on-road planning scenarios using the most challenging tractor-trailer dimensions.
Optimization-based motion planning for multi-steered articulated vehicles
Dec 12, 2019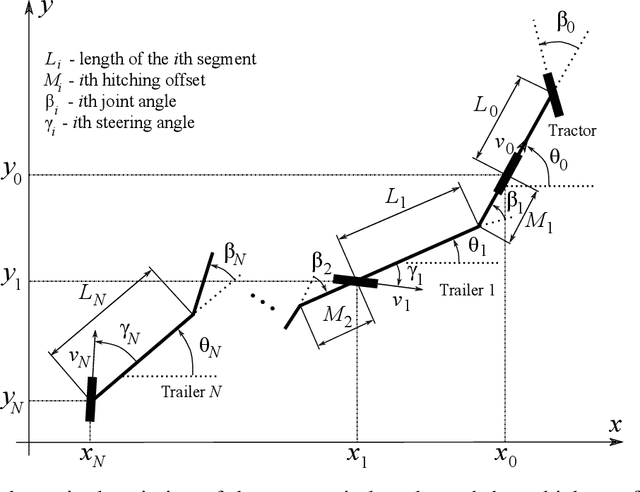
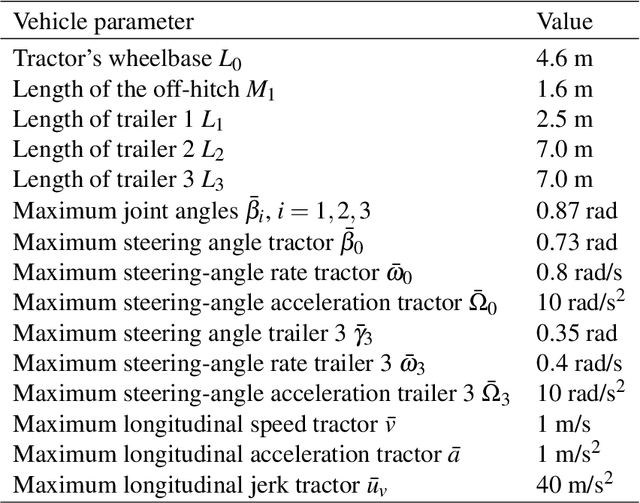

The task of maneuvering a multi-steered articulated vehicle in confined environments is difficult even for experienced drivers. In this work, we present an optimization-based trajectory planner targeting low-speed maneuvers in unstructured environments for multi-steered N-trailer vehicles, which are comprised of a car-like tractor and an arbitrary number of interconnected trailers with fixed or steerable wheels. The proposed trajectory planning framework is divided into two steps, where a lattice-based trajectory planner is used in a first step to compute a resolution optimal solution to a discretized version of the trajectory planning problem. The output from the lattice planner is then used in a second step to initialize an optimal control problem solver, which enables the framework to compute locally optimal trajectories that start at the vehicle's initial state and reaches the goal state exactly. The performance of the proposed optimization-based trajectory planner is evaluated in a set of practically relevant scenarios for a multi-steered 3-trailer vehicle with a car-like tractor where the last trailer is steerable.
A path planning and path-following control framework for a general 2-trailer with a car-like tractor
Apr 02, 2019
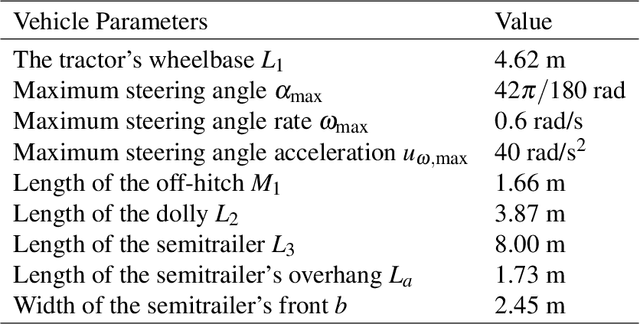
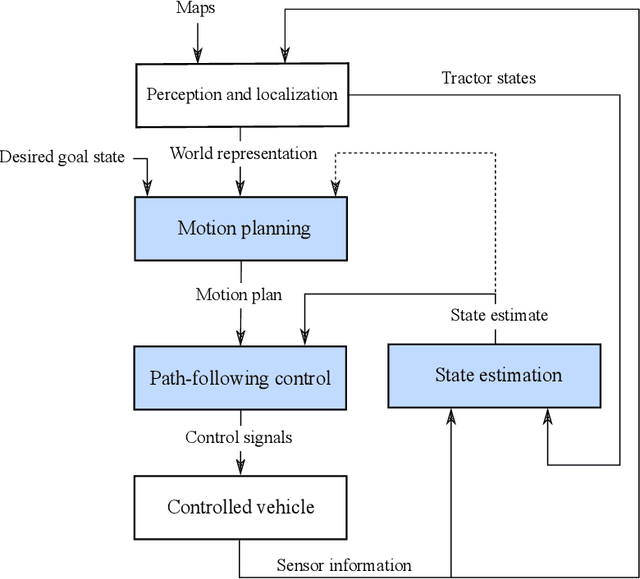
Maneuvering a general 2-trailer with a car-like tractor in backward motion is a task that requires significant skill to master and is unarguably one of the most complicated tasks a truck driver has to perform. This paper presents a path planning and path-following control solution that can be used to automatically plan and execute difficult parking and obstacle avoidance maneuvers by combining backward and forward motion. A lattice-based path planning framework is developed in order to generate kinematically feasible and collision-free paths and a path-following controller is designed to stabilize the lateral and angular path-following error states during path execution. To estimate the vehicle states needed for control, a nonlinear observer is developed which only utilizes information from sensors that are mounted on the car-like tractor, making the system independent of additional trailer sensors. The proposed path planning and path-following control framework is implemented on a full-scale test vehicle and results from simulations and real-world experiments are presented.
Path tracking and stabilization for a reversing general 2-trailer configuration using a cascaded control approach
Feb 22, 2016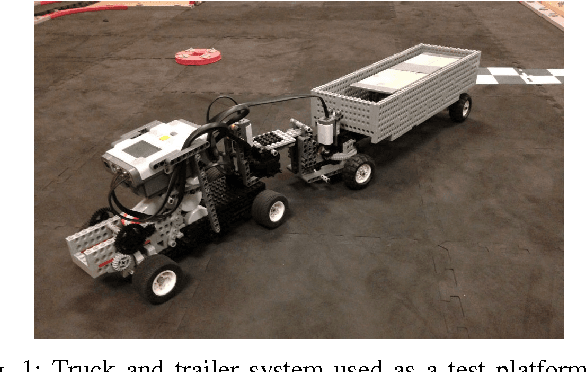
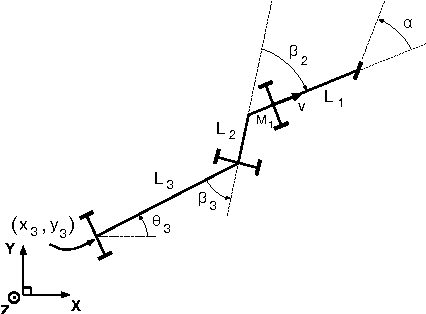
In this paper a cascaded approach for stabilization and path tracking of a general 2-trailer vehicle configuration with an off-axle hitching is presented. A low level Linear Quadratic controller is used for stabilization of the internal angles while a pure pursuit path tracking controller is used on a higher level to handle the path tracking. Piecewise linearity is the only requirement on the control reference which makes the design of reference paths very general. A Graphical User Interface is designed to make it easy for a user to design control references for complex manoeuvres given some representation of the surroundings. The approach is demonstrated with challenging path following scenarios both in simulation and on a small scale test platform.