 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFast and Modular Whole-Body Lagrangian Dynamics of Legged Robots with Changing Morphology
Apr 23, 2025Fast and modular modeling of multi-legged robots (MLRs) is essential for resilient control, particularly under significant morphological changes caused by mechanical damage. Conventional fixed-structure models, often developed with simplifying assumptions for nominal gaits, lack the flexibility to adapt to such scenarios. To address this, we propose a fast modular whole-body modeling framework using Boltzmann-Hamel equations and screw theory, in which each leg's dynamics is modeled independently and assembled based on the current robot morphology. This singularity-free, closed-form formulation enables efficient design of model-based controllers and damage identification algorithms. Its modularity allows autonomous adaptation to various damage configurations without manual re-derivation or retraining of neural networks. We validate the proposed framework using a custom simulation engine that integrates contact dynamics, a gait generator, and local leg control. Comparative simulations against hardware tests on a hexapod robot with multiple leg damage confirm the model's accuracy and adaptability. Additionally, runtime analyses reveal that the proposed model is approximately three times faster than real-time, making it suitable for real-time applications in damage identification and recovery.
Accelerated Design and Deployment of Low-Carbon Concrete for Data Centers
Apr 11, 2022
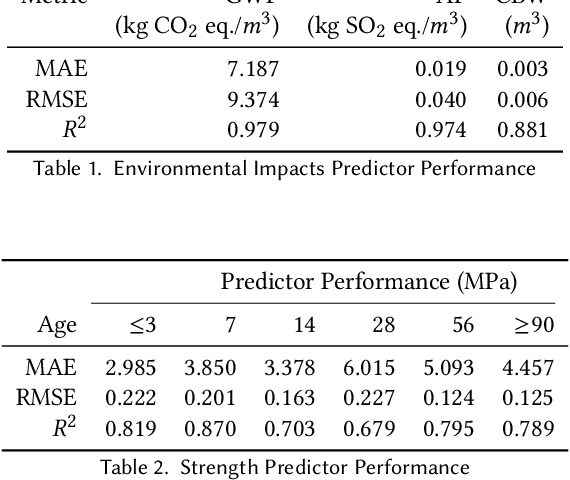

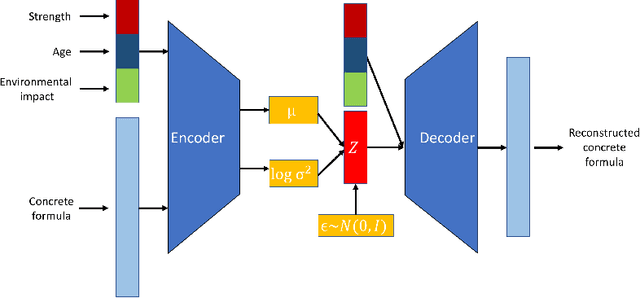
Concrete is the most widely used engineered material in the world with more than 10 billion tons produced annually. Unfortunately, with that scale comes a significant burden in terms of energy, water, and release of greenhouse gases and other pollutants; indeed 8% of worldwide carbon emissions are attributed to the production of cement, a key ingredient in concrete. As such, there is interest in creating concrete formulas that minimize this environmental burden, while satisfying engineering performance requirements including compressive strength. Specifically for computing, concrete is a major ingredient in the construction of data centers. In this work, we use conditional variational autoencoders (CVAEs), a type of semi-supervised generative artificial intelligence (AI) model, to discover concrete formulas with desired properties. Our model is trained just using a small open dataset from the UCI Machine Learning Repository joined with environmental impact data from standard lifecycle analysis. Computational predictions demonstrate CVAEs can design concrete formulas with much lower carbon requirements than existing formulations while meeting design requirements. Next we report laboratory-based compressive strength experiments for five AI-generated formulations, which demonstrate that the formulations exceed design requirements. The resulting formulations were then used by Ozinga Ready Mix -- a concrete supplier -- to generate field-ready concrete formulations, based on local conditions and their expertise in concrete design. Finally, we report on how these formulations were used in the construction of buildings and structures in a Meta data center in DeKalb, IL, USA. Results from field experiments as part of this real-world deployment corroborate the efficacy of AI-generated low-carbon concrete mixes.