 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAchieving Meaningful Collaboration: Worker-centered Design of a Physical Human-Robot Collaborative Blending Task
Oct 14, 2025
The use of robots in industrial settings continues to grow, driven by the need to address complex societal challenges such as labor shortages, aging populations, and ever-increasing production demands. In this abstract, we advocate for (and demonstrate) a transdisciplinary approach when considering robotics in the workplace. Transdisciplinarity emphasizes the integration of academic research with pragmatic expertise and embodied experiential knowledge, that prioritize values such as worker wellbeing and job attractiveness. In the following, we describe an ongoing multi-pronged effort to explore the potential of collaborative robots in the context of airplane engine repair and maintenance operations.
Can a mobile robot learn from a pedestrian model to prevent the sidewalk salsa?
Aug 29, 2025Pedestrians approaching each other on a sidewalk sometimes end up in an awkward interaction known as the "sidewalk salsa": they both (repeatedly) deviate to the same side to avoid a collision. This provides an interesting use case to study interactions between pedestrians and mobile robots because, in the vast majority of cases, this phenomenon is avoided through a negotiation based on implicit communication. Understanding how it goes wrong and how pedestrians end up in the sidewalk salsa will therefore provide insight into the implicit communication. This understanding can be used to design safe and acceptable robotic behaviour. In a previous attempt to gain this understanding, a model of pedestrian behaviour based on the Communication-Enabled Interaction (CEI) framework was developed that can replicate the sidewalk salsa. However, it is unclear how to leverage this model in robotic planning and decision-making since it violates the assumptions of game theory, a much-used framework in planning and decision-making. Here, we present a proof-of-concept for an approach where a Reinforcement Learning (RL) agent leverages the model to learn how to interact with pedestrians. The results show that a basic RL agent successfully learned to interact with the CEI model. Furthermore, a risk-averse RL agent that had access to the perceived risk of the CEI model learned how to effectively communicate its intention through its motion and thereby substantially lowered the perceived risk, and displayed effort by the modelled pedestrian. These results show this is a promising approach and encourage further exploration.
Towards Human-Centric Evaluation of Interaction-Aware Automated Vehicle Controllers: A Framework and Case Study
Aug 07, 2025As automated vehicles (AVs) increasingly integrate into mixed-traffic environments, evaluating their interaction with human-driven vehicles (HDVs) becomes critical. In most research focused on developing new AV control algorithms (controllers), the performance of these algorithms is assessed solely based on performance metrics such as collision avoidance or lane-keeping efficiency, while largely overlooking the human-centred dimensions of interaction with HDVs. This paper proposes a structured evaluation framework that addresses this gap by incorporating metrics grounded in the human-robot interaction literature. The framework spans four key domains: a) interaction effect, b) interaction perception, c) interaction effort, and d) interaction ability. These domains capture both the performance of the AV and its impact on human drivers around it. To demonstrate the utility of the framework, we apply it to a case study evaluating how a state-of-the-art AV controller interacts with human drivers in a merging scenario in a driving simulator. Measuring HDV-HDV interactions as a baseline, this study included one representative metric per domain: a) perceived safety, b) subjective ratings, specifically how participants perceived the other vehicle's driving behaviour (e.g., aggressiveness or predictability) , c) driver workload, and d) merging success. The results showed that incorporating metrics covering all four domains in the evaluation of AV controllers can illuminate critical differences in driver experience when interacting with AVs. This highlights the need for a more comprehensive evaluation approach. Our framework offers researchers, developers, and policymakers a systematic method for assessing AV behaviour beyond technical performance, fostering the development of AVs that are not only functionally capable but also understandable, acceptable, and safe from a human perspective.
A Model of the Sidewalk Salsa
Dec 05, 2024When two pedestrians approach each other on the sidewalk head-on, they sometimes engage in an awkward interaction, both deviating to the same side (repeatedly) to avoid a collision. This phenomenon is known as the sidewalk salsa. Although well known, no existing model describes how this "dance" arises. Such a model must capture the nuances of individual interactions between pedestrians that lead to the sidewalk salsa. Therefore, it could be helpful in the development of mobile robots that frequently participate in such individual interactions, for example, by informing robots in their decision-making. Here, I present a model based on the communication-enabled interaction framework capable of reproducing the sidewalk salsa. The model assumes pedestrians have a deterministic plan for their future movements and a probabilistic belief about the movements of another pedestrian. Combined, the plan and belief result in a perceived risk that pedestrians try to keep below a personal threshold. In simulations of this model, the sidewalk salsa occurs in a symmetrical scenario. At the same time, it shows behavior comparable to observed real-world pedestrian behavior in scenarios with initial position offsets or risk threshold differences. Two other scenarios provide support for a hypothesis from previous literature stating that cultural norms, in the form of a biased belief about on which side others will pass (i.e. deviating to the left or right), contribute to the occurrence of the sidewalk salsa. Thereby, the proposed model provides insight into how the sidewalk salsa arises.
Automatic extraction of similar traffic scenes from large naturalistic datasets using the Hausdorff distance
Jun 17, 2022

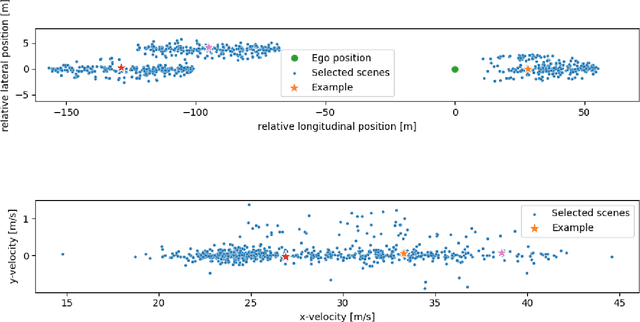
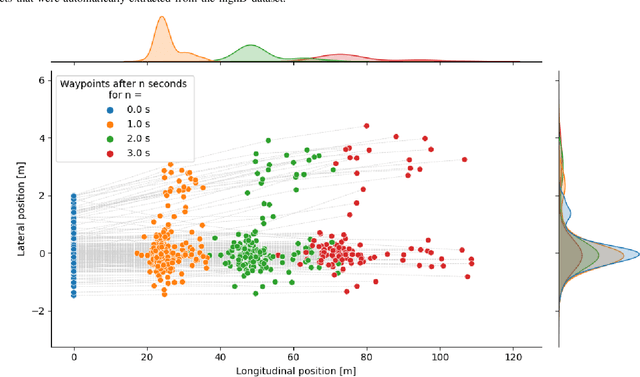
Recently, multiple naturalistic traffic datasets of human-driven trajectories have been published (e.g., highD, NGSim, and pNEUMA). These datasets have been used in studies that investigate variability in human driving behavior, for example for scenario-based validation of autonomous vehicle (AV) behavior, modeling driver behavior, or validating driver models. Thus far, these studies focused on the variability on an operational level (e.g., velocity profiles during a lane change), not on a tactical level (i.e., to change lanes or not). Investigating the variability on both levels is necessary to develop driver models and AVs that include multiple tactical behaviors. To expose multi-level variability, the human responses to the same traffic scene could be investigated. However, no method exists to automatically extract similar scenes from datasets. Here, we present a four-step extraction method that uses the Hausdorff distance, a mathematical distance metric for sets. We performed a case study on the highD dataset that showed that the method is practically applicable. The human responses to the selected scenes exposed the variability on both the tactical and operational levels. With this new method, the variability in operational and tactical human behavior can be investigated, without the need for costly and time-consuming driving-simulator experiments.
Validating human driver models for interaction-aware automated vehicle controllers: A human factors approach
Sep 27, 2021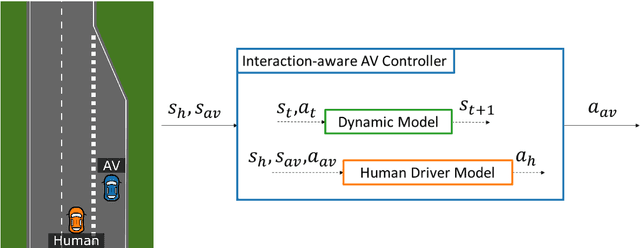
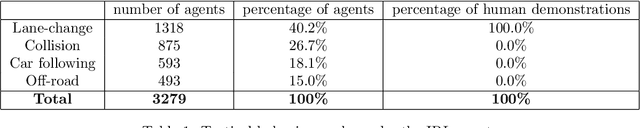


A major challenge for autonomous vehicles is interacting with other traffic participants safely and smoothly. A promising approach to handle such traffic interactions is equipping autonomous vehicles with interaction-aware controllers (IACs). These controllers predict how surrounding human drivers will respond to the autonomous vehicle's actions, based on a driver model. However, the predictive validity of driver models used in IACs is rarely validated, which can limit the interactive capabilities of IACs outside the simple simulated environments in which they are demonstrated. In this paper, we argue that besides evaluating the interactive capabilities of IACs, their underlying driver models should be validated on natural human driving behavior. We propose a workflow for this validation that includes scenario-based data extraction and a two-stage (tactical/operational) evaluation procedure based on human factors literature. We demonstrate this workflow in a case study on an inverse-reinforcement-learning-based driver model replicated from an existing IAC. This model only showed the correct tactical behavior in 40% of the predictions. The model's operational behavior was inconsistent with observed human behavior. The case study illustrates that a principled evaluation workflow is useful and needed. We believe that our workflow will support the development of appropriate driver models for future automated vehicles.
Stepping Forward with Exoskeletons: Team IHMC's Design and Approach in the 2016 Cybathlon
Dec 25, 2017
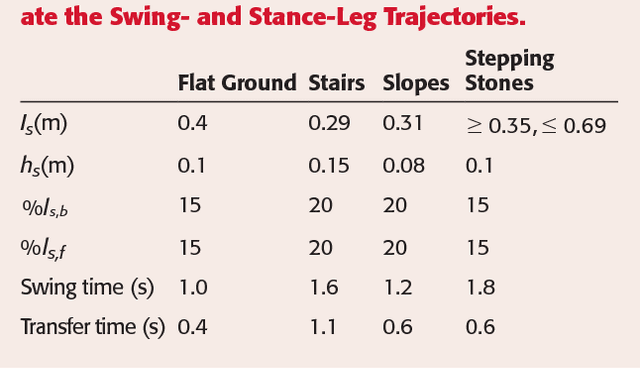
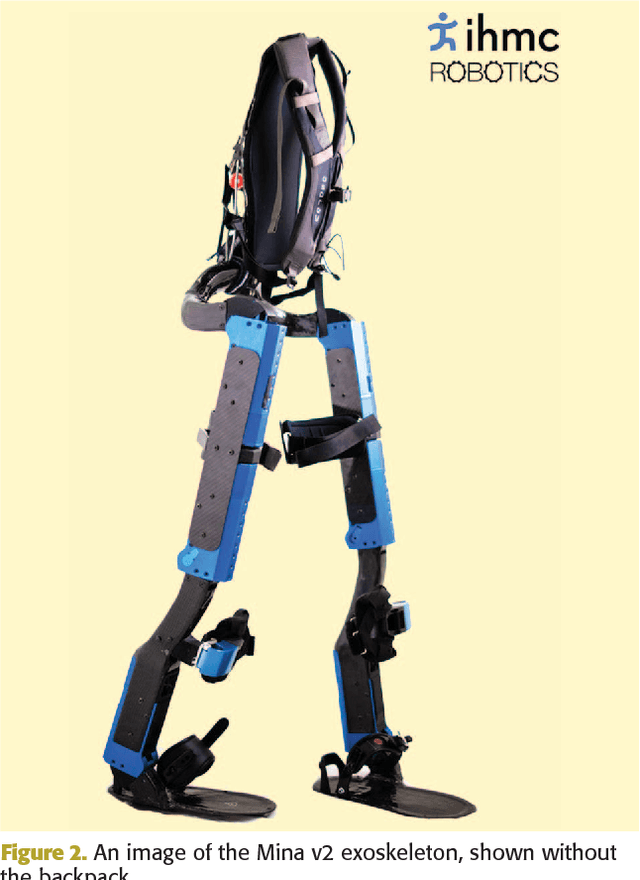
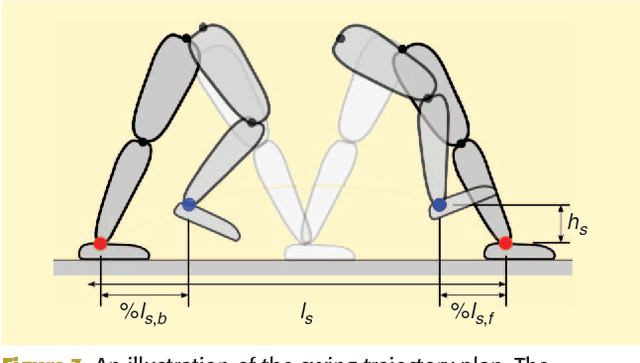
Exoskeletons are a promising technology that enables individuals with mobility limitations to walk again. As the 2016 Cybathlon illustrated, however, the community has a considerable way to go before exoskeletons have the necessary capabilities to be incorporated into daily life. While most exoskeletons power only hip and knee flexion, Team Institute for Human and Machine Cognition (IHMC) presents a new exoskeleton, Mina v2, which includes a powered ankle dorsi/plantar flexion. As our entry to the 2016 Cybathlon Powered Exoskeleton Competition, Mina v2's performance allowed us to explore the effectiveness of its powered ankle compared to other powered exoskeletons for pilots with paraplegia. We designed our gaits to incorporate powered ankle plantar flexion to help improve mobility, which allowed our pilot to navigate the given Cybathlon tasks quickly, including those that required ascending movements, and reliably achieve average, conservative walking speeds of 1.04 km/h (0.29 m/s). This enabled our team to place second overall in the Powered Exoskeleton Competition in the 2016 Cybathlon.