 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFoundation models on the bridge: Semantic hazard detection and safety maneuvers for maritime autonomy with vision-language models
Dec 30, 2025The draft IMO MASS Code requires autonomous and remotely supervised maritime vessels to detect departures from their operational design domain, enter a predefined fallback that notifies the operator, permit immediate human override, and avoid changing the voyage plan without approval. Meeting these obligations in the alert-to-takeover gap calls for a short-horizon, human-overridable fallback maneuver. Classical maritime autonomy stacks struggle when the correct action depends on meaning (e.g., diver-down flag means people in the water, fire close by means hazard). We argue (i) that vision-language models (VLMs) provide semantic awareness for such out-of-distribution situations, and (ii) that a fast-slow anomaly pipeline with a short-horizon, human-overridable fallback maneuver makes this practical in the handover window. We introduce Semantic Lookout, a camera-only, candidate-constrained vision-language model (VLM) fallback maneuver selector that selects one cautious action (or station-keeping) from water-valid, world-anchored trajectories under continuous human authority. On 40 harbor scenes we measure per-call scene understanding and latency, alignment with human consensus (model majority-of-three voting), short-horizon risk-relief on fire hazard scenes, and an on-water alert->fallback maneuver->operator handover. Sub-10 s models retain most of the awareness of slower state-of-the-art models. The fallback maneuver selector outperforms geometry-only baselines and increases standoff distance on fire scenes. A field run verifies end-to-end operation. These results support VLMs as semantic fallback maneuver selectors compatible with the draft IMO MASS Code, within practical latency budgets, and motivate future work on domain-adapted, hybrid autonomy that pairs foundation-model semantics with multi-sensor bird's-eye-view perception and short-horizon replanning.
Explaining a Deep Reinforcement Learning Docking Agent Using Linear Model Trees with User Adapted Visualization
Mar 01, 2022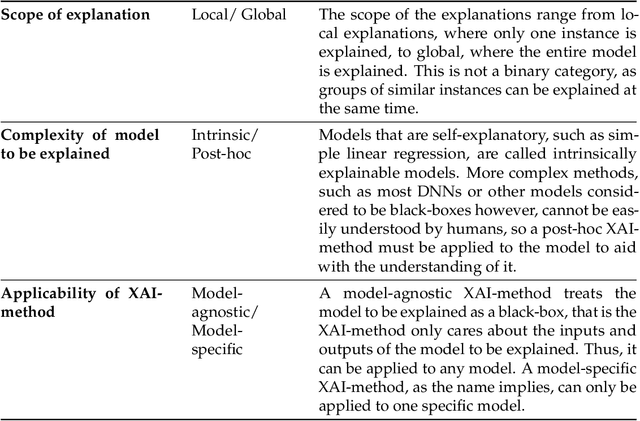
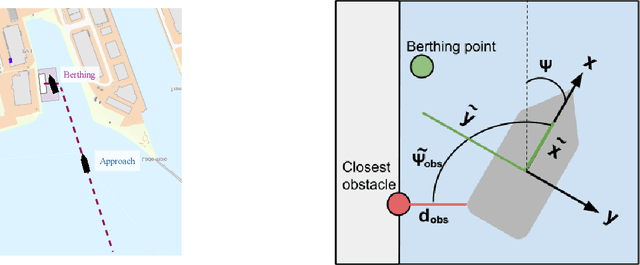
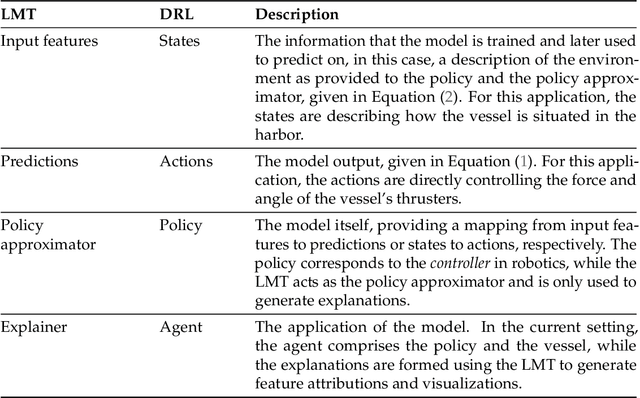
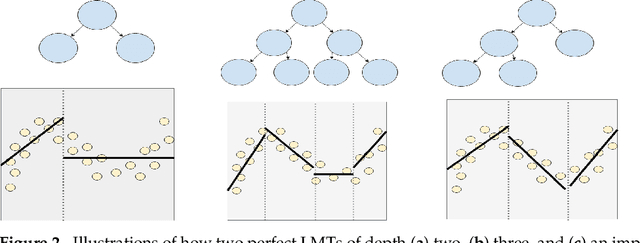
Deep neural networks (DNNs) can be useful within the marine robotics field, but their utility value is restricted by their black-box nature. Explainable artificial intelligence methods attempt to understand how such black-boxes make their decisions. In this work, linear model trees (LMTs) are used to approximate the DNN controlling an autonomous surface vessel (ASV) in a simulated environment and then run in parallel with the DNN to give explanations in the form of feature attributions in real-time. How well a model can be understood depends not only on the explanation itself, but also on how well it is presented and adapted to the receiver of said explanation. Different end-users may need both different types of explanations, as well as different representations of these. The main contributions of this work are (1) significantly improving both the accuracy and the build time of a greedy approach for building LMTs by introducing ordering of features in the splitting of the tree, (2) giving an overview of the characteristics of the seafarer/operator and the developer as two different end-users of the agent and receiver of the explanations, and (3) suggesting a visualization of the docking agent, the environment, and the feature attributions given by the LMT for when the developer is the end-user of the system, and another visualization for when the seafarer or operator is the end-user, based on their different characteristics.