 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFinite Difference Neural Networks: Fast Prediction of Partial Differential Equations
Jun 02, 2020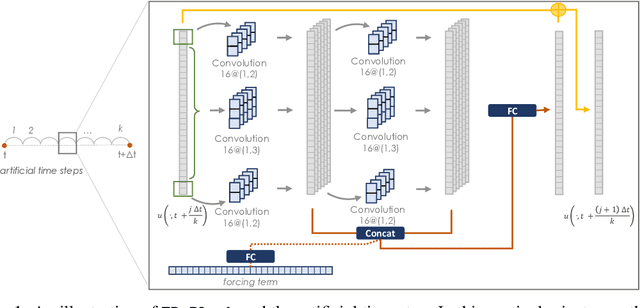
Discovering the underlying behavior of complex systems is an important topic in many science and engineering disciplines. In this paper, we propose a novel neural network framework, finite difference neural networks (FDNet), to learn partial differential equations from data. Specifically, our proposed finite difference inspired network is designed to learn the underlying governing partial differential equations from trajectory data, and to iteratively estimate the future dynamical behavior using only a few trainable parameters. We illustrate the performance (predictive power) of our framework on the heat equation, with and without noise and/or forcing, and compare our results to the Forward Euler method. Moreover, we show the advantages of using a Hessian-Free Trust Region method to train the network.
FD-Net with Auxiliary Time Steps: Fast Prediction of PDEs using Hessian-Free Trust-Region Methods
Oct 29, 2019
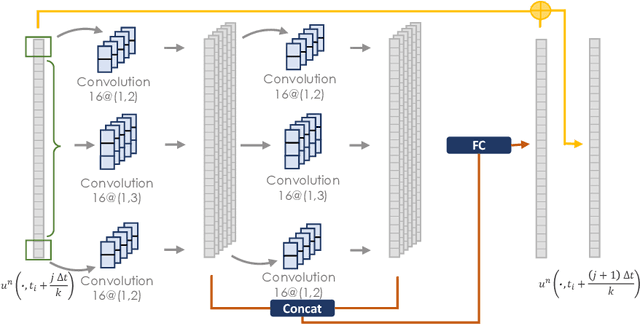
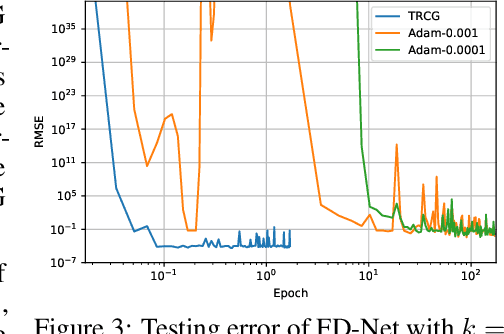
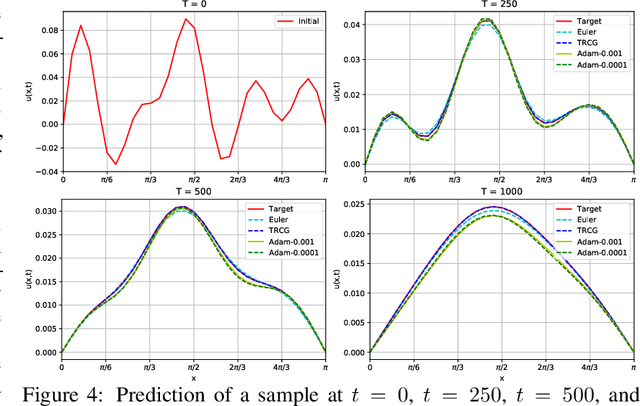
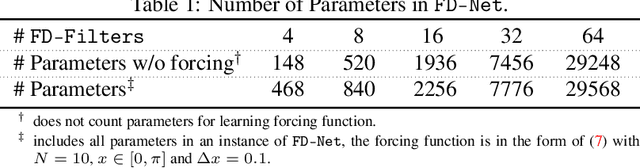
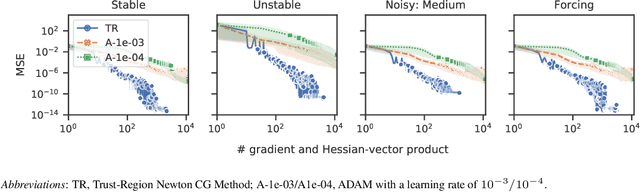
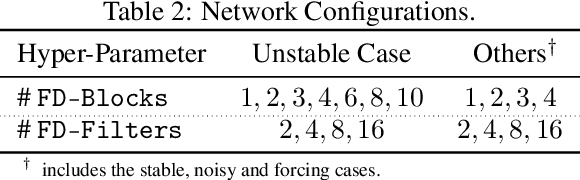
Discovering the underlying physical behavior of complex systems is a crucial, but less well-understood topic in many engineering disciplines. This study proposes a finite-difference inspired convolutional neural network framework to learn hidden partial differential equations from given data and iteratively estimate future dynamical behavior. The methodology designs the filter sizes such that they mimic the finite difference between the neighboring points. By learning the governing equation, the network predicts the future evolution of the solution by using only a few trainable parameters. In this paper, we provide numerical results to compare the efficiency of the second-order Trust-Region Conjugate Gradient (TRCG) method with the first-order ADAM optimizer.